Sense HAT
关于
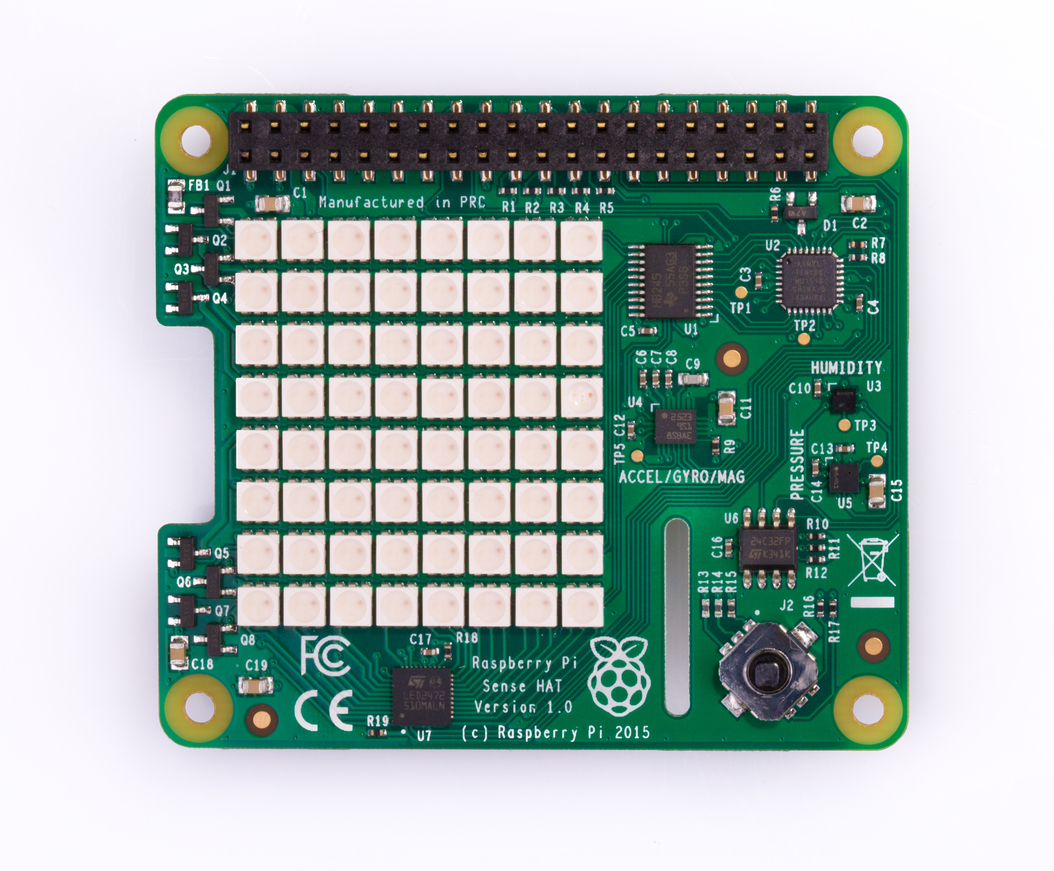
Raspberry Pi Sense HAT 是一块附加板,可为 Raspberry Pi 提供一系列传感功能。通过板载传感器,您可以监测压力、湿度、温度、颜色、方向和移动。通过 8×8 RGB LED 矩阵,您可以将传感器的数据可视化。五键操纵杆可让用户与项目互动。
Sense HAT 最初是为在国际空间站上使用而开发的,是 树莓派基金会 与 欧洲航天局 合作开展的教育 Astro Pi 计划的一部分。它可以帮助任何需要位置、运动、方向或环境传感的项目。
官方支持的 Python 库 提供了对板载传感器、LED 矩阵和操纵杆的访问。Sense HAT 兼容任何带有 40 引脚 GPIO 接头的 Raspberry Pi 设备。
特性
Sense HAT 有一个 8×8 RGB LED 矩阵和一个五键操纵杆,还包括以下传感器:
- 陀螺仪
- 加速计
- 磁力计
- 温度计
- 气压
- 湿度
- 颜色和亮度
Sense HAT 和 Sense HAT V2 的原理图和机械图纸 可从产品信息门户下载。
LED矩阵
LED 矩阵是一个 RGB565 帧缓冲器,id 为 RPi-Sense FB。相应的设备节点可作为标准文件或mmap文件写入。附带的 "snake" 示例展示了如何访问帧缓冲器。
操纵杆
操纵杆作为输入事件设备出现,名为 Raspberry Pi Sense HAT Joystick,映射到方向键和 回车键。任何能够处理输入的库都应支持它,或者直接通过 evdev 接口 支持。合适的库包括 SDL、pygame 和 python-evdev 等。附带的 snake 示例展示了如何直接访问操纵杆。
安装
为了正常工作,Sense HAT 需要
- 最新的内核
- 在 Raspberry Pi 上启用 I2C。
- 一些依赖项
完成以下步骤,让您的 Raspberry Pi 设备准备好连接到 Sense HAT:
- 首先,确保 Raspberry Pi 运行最新软件。运行以下命令更新:
sudo apt update
- 接下来,安装 sense-hat 软件包,它将确保内核是最新的,启用 I2C 并安装必要的库和程序:
sudo apt install sense-hat
- 最后,如果在安装之前禁用了 I2C 或��内核不是最新的,可能需要重启:
sudo reboot
校准
安装必要的软件并运行校准程序,如下所示:
sudo apt update
sudo apt install octave -y
cd
cp /usr/share/librtimulib-utils/RTEllipsoidFit ./ -a
cd RTEllipsoidFit
RTIMULibCal
校准程序将显示以下菜单:
Options are:
m - calibrate magnetometer with min/max
e - calibrate magnetometer with ellipsoid (do min/max first)
a - calibrate accelerometers
x - exit
Enter option:
按小写 m。按任意键开始。
Magnetometer min/max calibration
--------------------------------
Waggle the IMU chip around, ensuring that all six axes
(+x, -x, +y, -y and +z, -z) go through their extrema.
When all extrema have been achieved, enter 's' to save, 'r' to reset
or 'x' to abort and discard the data.
Press any key to start...
启动后,你会看到类似下面的输出在屏幕上滚动:
Min x: 51.60 min y: 69.39 min z: 65.91
Max x: 53.15 max y: 70.97 max z: 67.97
关注屏幕最下方的两行,因为这两行是程序最近发布的测量结果。
现在,拿起树莓派和 Sense HAT,以你能想到的各种方式移动它。如果能拔掉所有非必要的电缆,就能避免杂乱无章。
尝试在俯仰、滚动和偏航轴上各绕一圈。注意在此过程中不要意外弹出 SD 卡。花几分钟移动 Sense HAT,当发现数字不再变化时停止。
现在按小写 s,然后按小写 x 退出程序。现在运行 ls 命令,你会看到一个新的 RTIMULib.ini 文件已经创建。
除上述步骤外,您还可以按上述步骤进行椭圆拟合,但要按 e 而不是 m。
完成后,将生成的 RTIMULib.ini 文件复制到 /etc/,并删除 ~/.config/sense_hat/ 中的本地副本:
rm ~/.config/sense_hat/RTIMULib.ini
sudo cp RTIMULib.ini /etc
开始使用
安装完成后,可在 /usr/src/sense-hat/examples 下找到示例代码。
Python使用Sense HAT
sense-hat 是官方支持的 Sense HAT 库;它提供了对所有板载传感器和 LED 矩阵的访问。
有关该库的完整文档,请访问 sense-hat.readthedocs.io。
C++使用Sense HAT
RTIMULib 是一个 C++ 和 Python 库,可在嵌入式 Linux 系统中轻松使用 9-dof 和 10-dof IMU。/etc/RTIMULib.ini中提供了一个预校准设置文件,sense-hat也可以复制并使用该文件。附带的示例会在当前工作目录下查找 RTIMULib.ini,因此您可以将该文件复制到该目录下,以获得更准确的数据。
RTIMULibDrive11 示例已预编译,有助于确保一切按预期运行。运行 RTIMULibDrive11 即可启动该示例,按下 Ctrl C 关闭该示例。
C/C++ 示例可通过在相应目录下运行 make 进行编译。
故障排除
读写EEPROM数据
这些步骤仅供调试之用。
在 Raspberry Pi 2 Model B Rev 1.0 和 Raspberry Pi 3 Model B 板上,这些步骤可能不起作用。固件将控制 I2C0,使 ID 引脚配置为输入。
在向 Sense HAT 读写 EEPROM 数据之前,必须完成以下步骤:
- 在 /boot/firmware/config.txt 文件中添加以下一行,启用 I2C0 和 I2C1:
dtparam=i2c_vc=on
dtparam=i2c_arm=on
- 运行以下命令重新启动
sudo systemctl reboot
- 下载并构建 flash 工具:
git clone https://github.com/raspberrypi/hats.git
cd hats/eepromutils
make
读取
要读取 EEPROM 数据,请运行以下命令:
sudo ./eepflash.sh -f=sense_read.eep -t=24c32 -r
写入
此操作不会损坏 Raspberry Pi 或 Sense HAT,但如果发生错误,Raspberry Pi 可能无法自动检测 HAT。
- 首先,下载 EEPROM 设置并构建
.eep二进制文件:
wget https://github.com/raspberrypi/rpi-sense/raw/master/eeprom/eeprom_settings.txt -O sense_eeprom.txt
./eepmake sense_eeprom.txt sense.eep /boot/firmware/overlays/rpi-sense-overlay.dtb
- 下一步,禁用写保护:
i2cset -y -f 1 0x46 0xf3 1
- 写入 EEPROM 数据:
sudo ./eepflash.sh -f=sense.eep -t=24c32 -w
- 最后,重新启用写保护:
i2cset -y -f 1 0x46 0xf3 0
中文翻译版以英文版相同知识授权方式共享:CC-BY-SA 4.0。交流 Q群:498908352