树莓派硬件
介绍
Raspberry Pi 电脑分为几个不同的系列�:
- 单板计算机(SBCs)。旗舰级的树莓派系列在信用卡大小的机身内,集成了高性能硬件、完整的Linux操作系统以及多种通用接口。
- 键盘计算机(X00)。树莓派键盘计算机将单板计算机硬件、完整的Linux操作系统及常用接口整合于紧凑的键盘外壳内。
- Zero。采用极简设计的小型经济型机型,提供完整的Linux操作系统和基本接口,具有低功耗特性。
- 计算模块(CM)。 专为嵌入式及工业应用设计的板卡,提供与旗舰级单板计算机相同的硬件配置,但采用更小尺寸且无板载接口。需连接独立底板以获取必要端口和引脚。
- Pico(微控制器)。小巧多功能板卡,不运行Linux系统。程序直接刷写至板载存储器,无需可移除存储介质。Pico微控制器适用于实时控制与轻量级嵌入式项目。
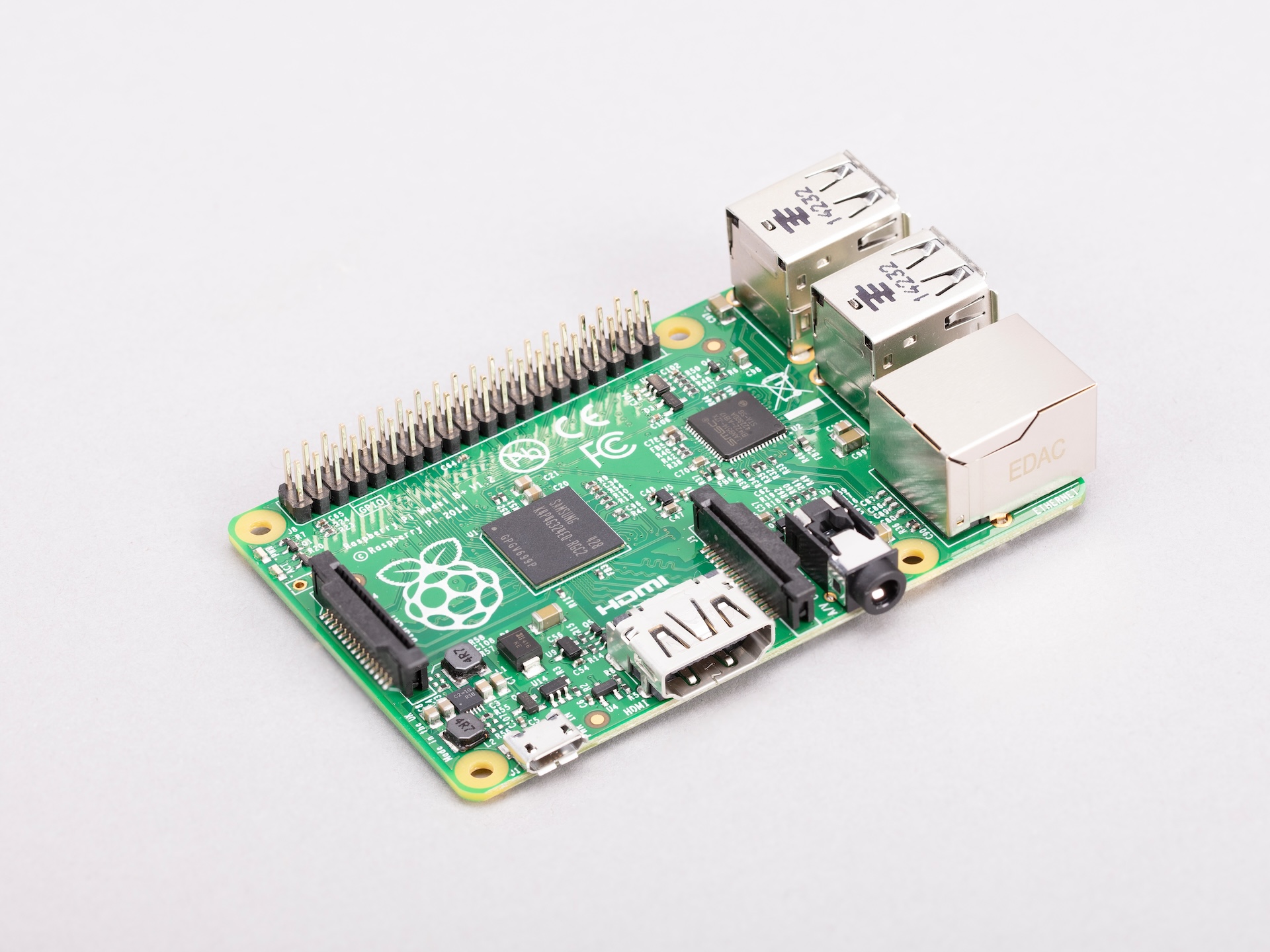
旗舰级单板计算机(SBC)系列
Model B 表示有以太网端口。 Model A 表示成本较低的型号,外形较小,��没有以太网端口,RAM 较小,USB 端口较少,以限制电路板高度。
由于核心SoC停产,树莓派2B的1.1版和1.2版已达到产品生命周期终止(EoL)。官方EoL日期为2025年10月16日。树莓派2B修订版1.3采用相同机械尺寸并搭载BCM2837B0处理器,因此推荐用于现有设计。更多详情请参阅官方停产通知。
| 型号 | SoC | 内存 | GPIO | 接口 |
|---|---|---|---|---|
 Raspberry Pi Model B Raspberry Pi Model B | BCM2835 | 256MB 512MB | 26针GPIO头 |
|
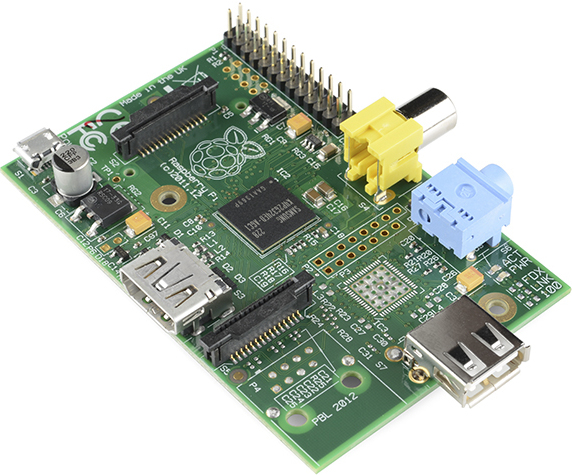 Raspberry Pi Model A Raspberry Pi Model A | BCM2835 | 256MB | 26针GPIO头 |
|
 Raspberry Pi Model B+ Raspberry Pi Model B+ | BCM2835 | 512MB | 40针GPIO头 |
|
 Raspberry Pi Model A+ Raspberry Pi Model A+ | BCM2835 | 256MB 512MB | 40针GPIO头 |
|
 Raspberry Pi Model 2B Raspberry Pi Model 2B | 1 GB | 40针GPIO头 |
| |
 Raspberry Pi Model 3B Raspberry Pi Model 3B | 1 GB | 40针GPIO头 |
| |
 Raspberry Pi Model 3B+ Raspberry Pi Model 3B+ | BCM2837B0 | 1 GB | 40针GPIO头 |
|
 Raspberry Pi Model 3A+ Raspberry Pi Model 3A+ | BCM2837B0 | 512MB | 40针GPIO头 |
|
 Raspberry Pi Model 4B Raspberry Pi Model 4B | BCM2711 | 1 GB 2 GB 3 GB 4 GB 8 GB | 40针GPIO头 |
|
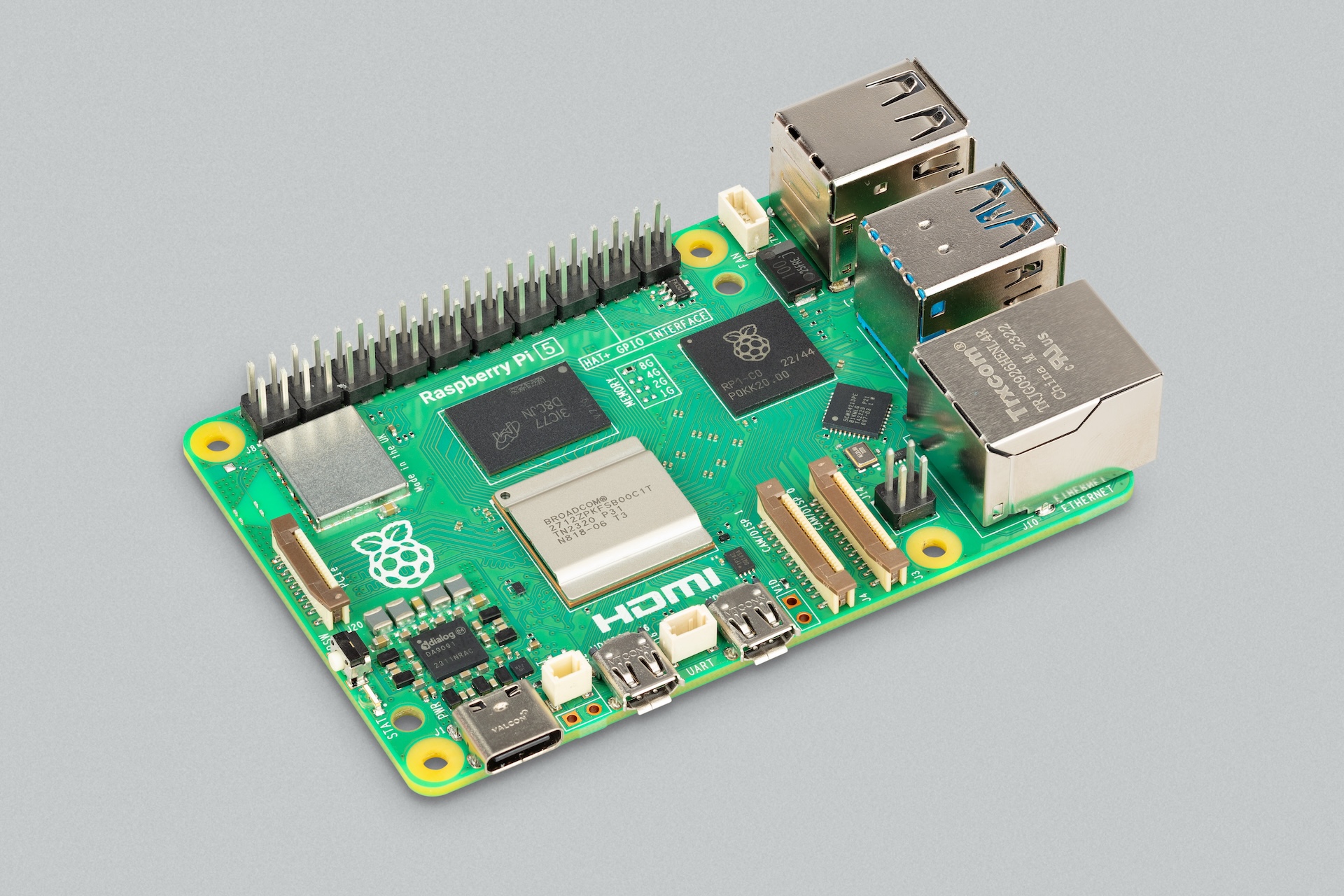 Raspberry Pi Model 5 Raspberry Pi Model 5 | BCM2712 | 1 GB 2 GB 4 GB 8 GB 16 GB | 40针GPIO头 |
|
键盘计算机系列(X00)
键盘系列设备采用<X00>形式的型号标识符,其中X代表对应的旗舰单板计算机(SBC)系列设备。例如,树莓派400即为树莓派4的键盘版本。有关树莓派键盘计算机的详细信息,请参阅键盘计算机。
| 型号 | SoC | 内存 | GPIO | 接口 |
|---|---|---|---|---|
 Raspberry Pi 400 Raspberry Pi 400 | BCM2711 | 4 GB | 40针GPIO头 |
|
 Raspberry Pi 500 Raspberry Pi 500 | BCM2712 | 8 GB | 40针GPIO头 |
|
 Raspberry Pi 500+ Raspberry Pi 500+ | BCM2712 | 16 GB | 40针GPIO头 |
|
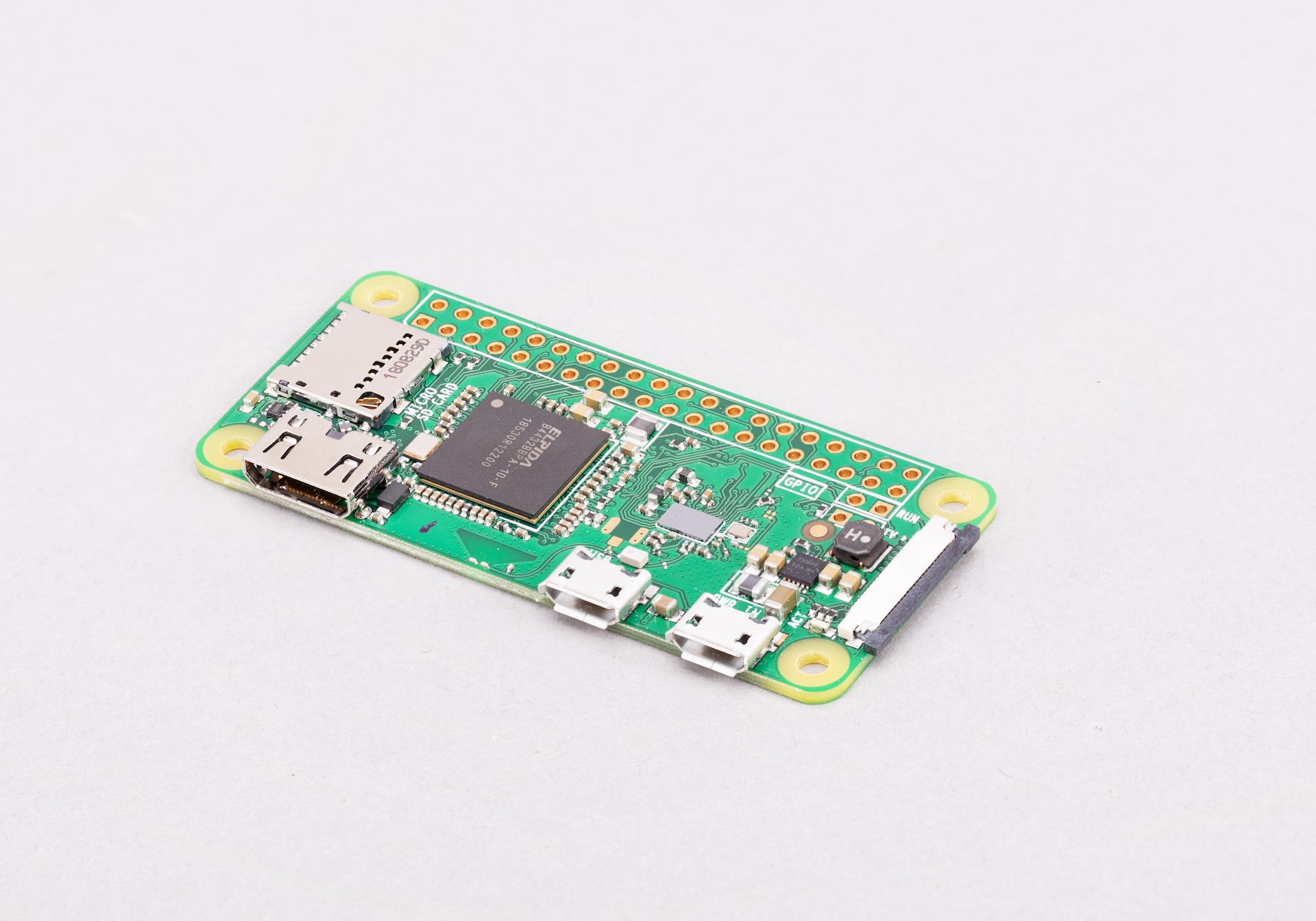
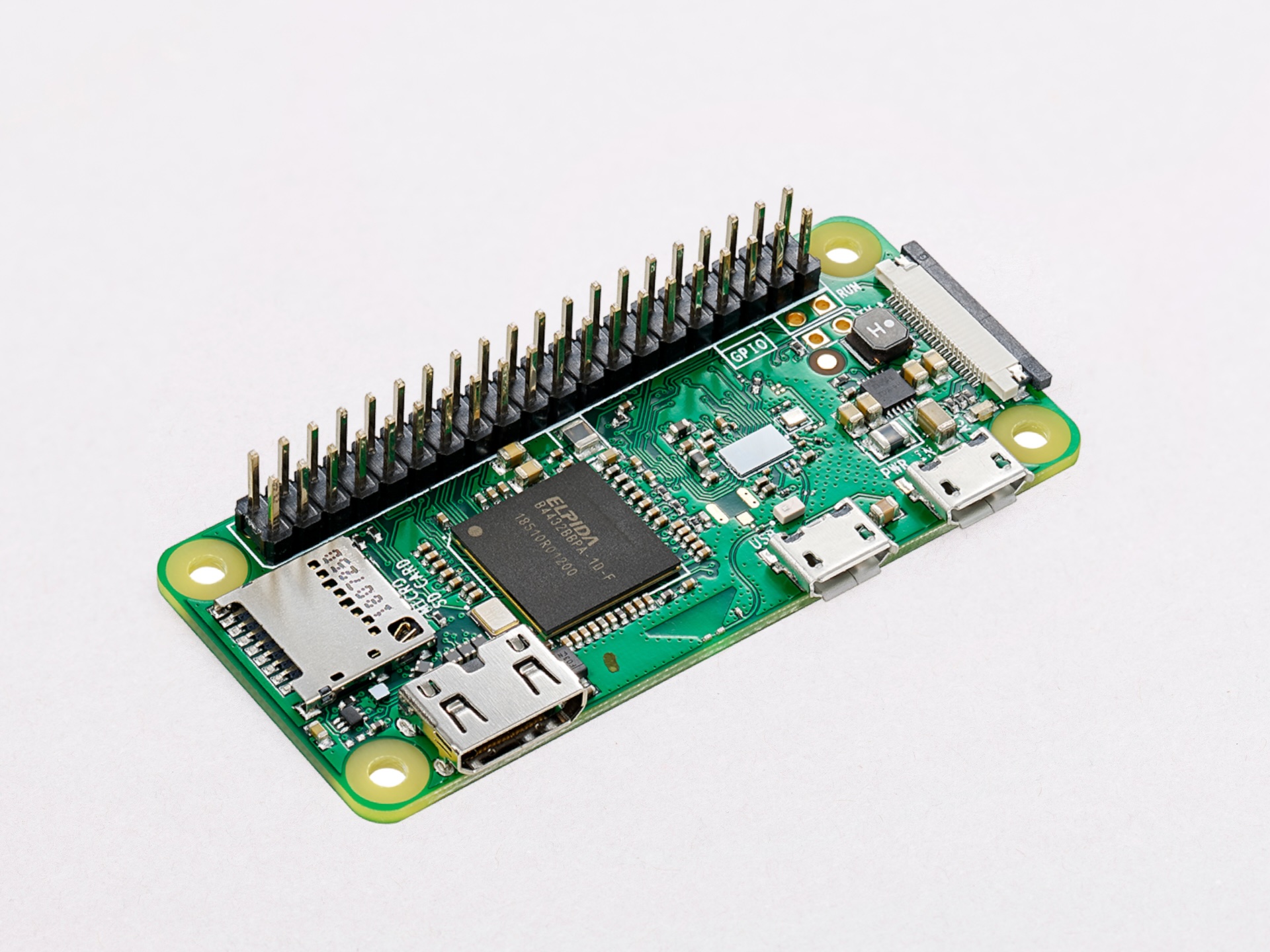
Zero系列
后缀为 H 的型号已将针脚预焊在 GPIO 针脚上。没有后缀 H 的型号不带连接到 GPIO 针座的针座引脚��;用户必须手动焊接引脚或安装第三方引脚套件。
所有 Zero 型号都具有以下连接功能:
- 1 个 microSD 卡插槽
- 1 个微型 HDMI 端口
- 2 个微型 USB 端口(一个用于输入电源,一个用于外接设备)
自原始 Zero 1.3 版起,所有 Zero 型号还包括
- 微型 22 针、0.5 毫米(精细)间距、11.5 毫米宽 CSI(摄像头)端口
| 型号 | SoC | 内存 | GPIO | 无线连接 |
|---|---|---|---|---|
 Raspberry Pi Zero Raspberry Pi Zero | BCM2835 | 512MB | 40针GPIO头(未填充) | 无 |
 Raspberry Pi Zero W Raspberry Pi Zero W | BCM2835 | 512MB | 40针GPIO头(未填充) |
|
 Raspberry Pi Zero WH Raspberry Pi Zero WH | BCM2835 | 512MB | 40针GPIO头 |
|
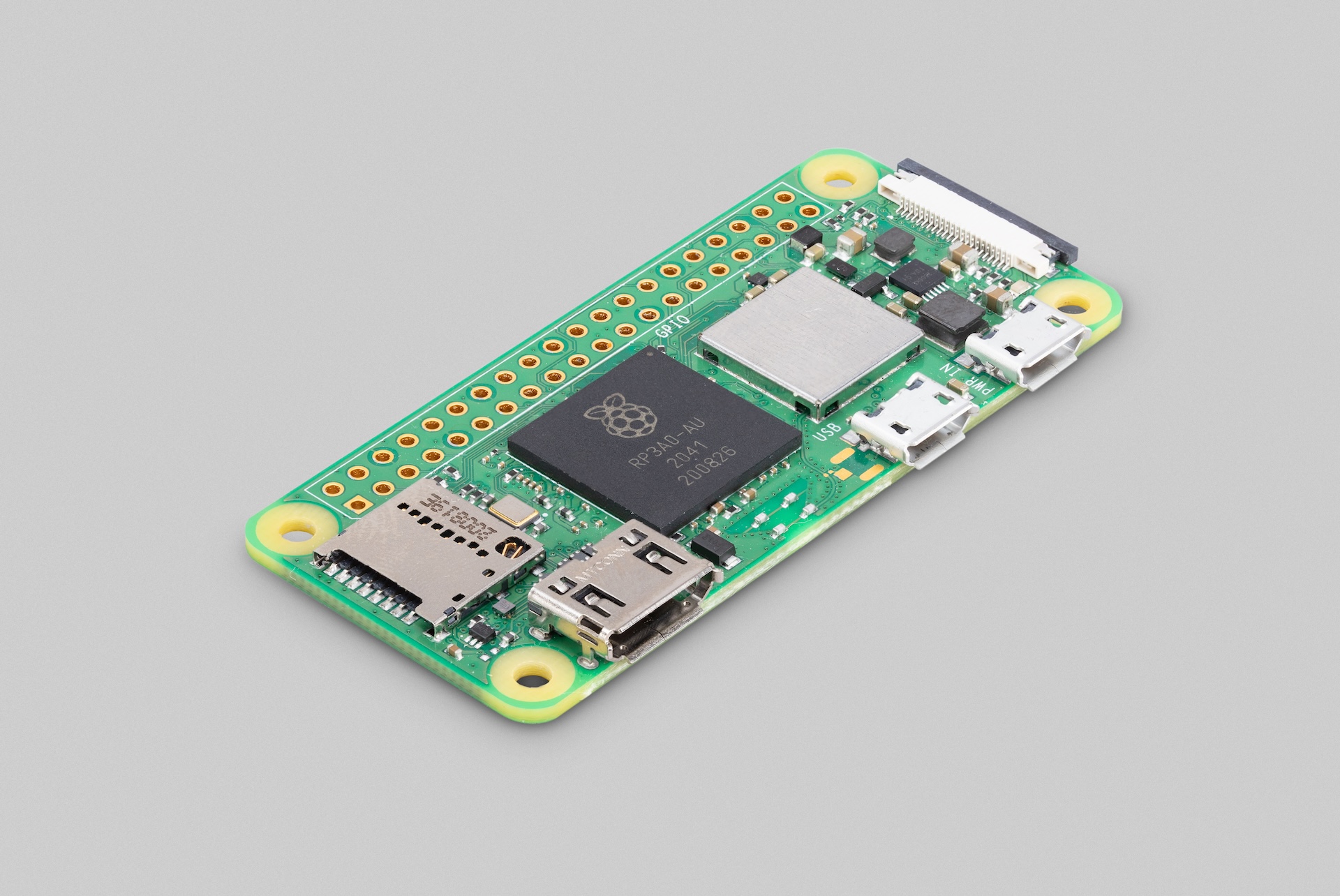 Raspberry Pi Zero 2 W Raspberry Pi Zero 2 W | RP3A0 | 512MB | 40针GPIO头(未填充) |
|
 Raspberry Pi Zero 2 WH Raspberry Pi Zero 2 WH | RP3A0 | 512MB | 40针GPIO头(未填充) |
|
Compute Module系列
由于核心SoC停产,树莓派计算模块3(CM3)和计算模块3精简版(CM3Lite)已达到产品生命周期终止(EoL)。官方EoL日期为2025年10月16日。与CM3最接近的替代品是树莓派计算模块3+,其提供相同的机械尺寸、改进的散热设计以及BCM2837B0处理器,因此推荐用于现有设计。对于需要SODIMM规格的新设计,建议选用计算模块4S;其他新设计则推荐计算模块4或计算模块5。更多详情请参阅官方停产通知。
有关树莓派计算模块硬件的更多详细信息,请参阅 计算模块硬件。
| 型号 | SoC | 内存 | �存贮 | 外型尺寸 | 无线连接 |
|---|---|---|---|---|---|
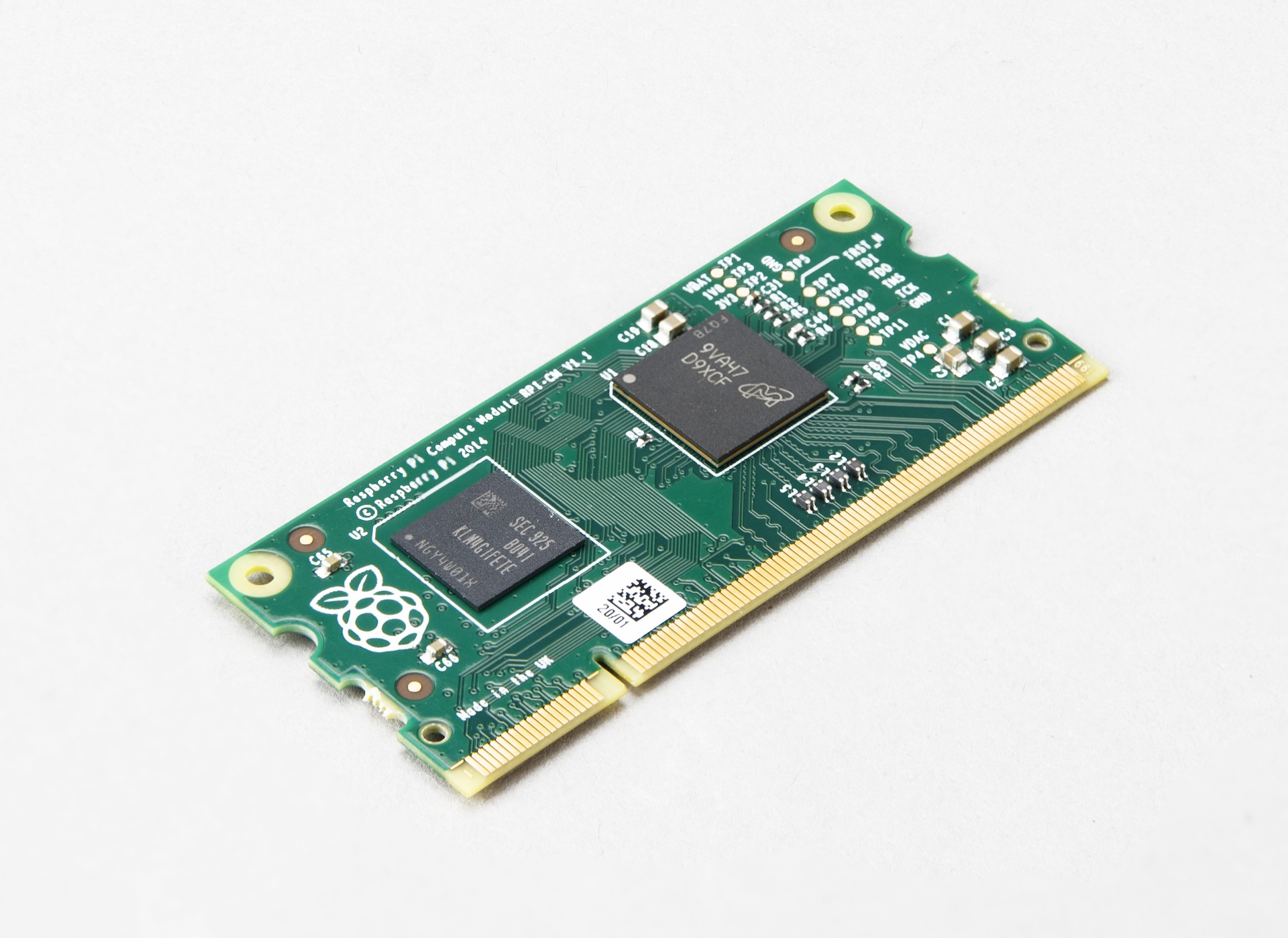 Raspberry Pi Compute Module 1 Raspberry Pi Compute Module 1 | BCM2835 | 512MB | 4GB | DDR2 SODIMM | 无 |
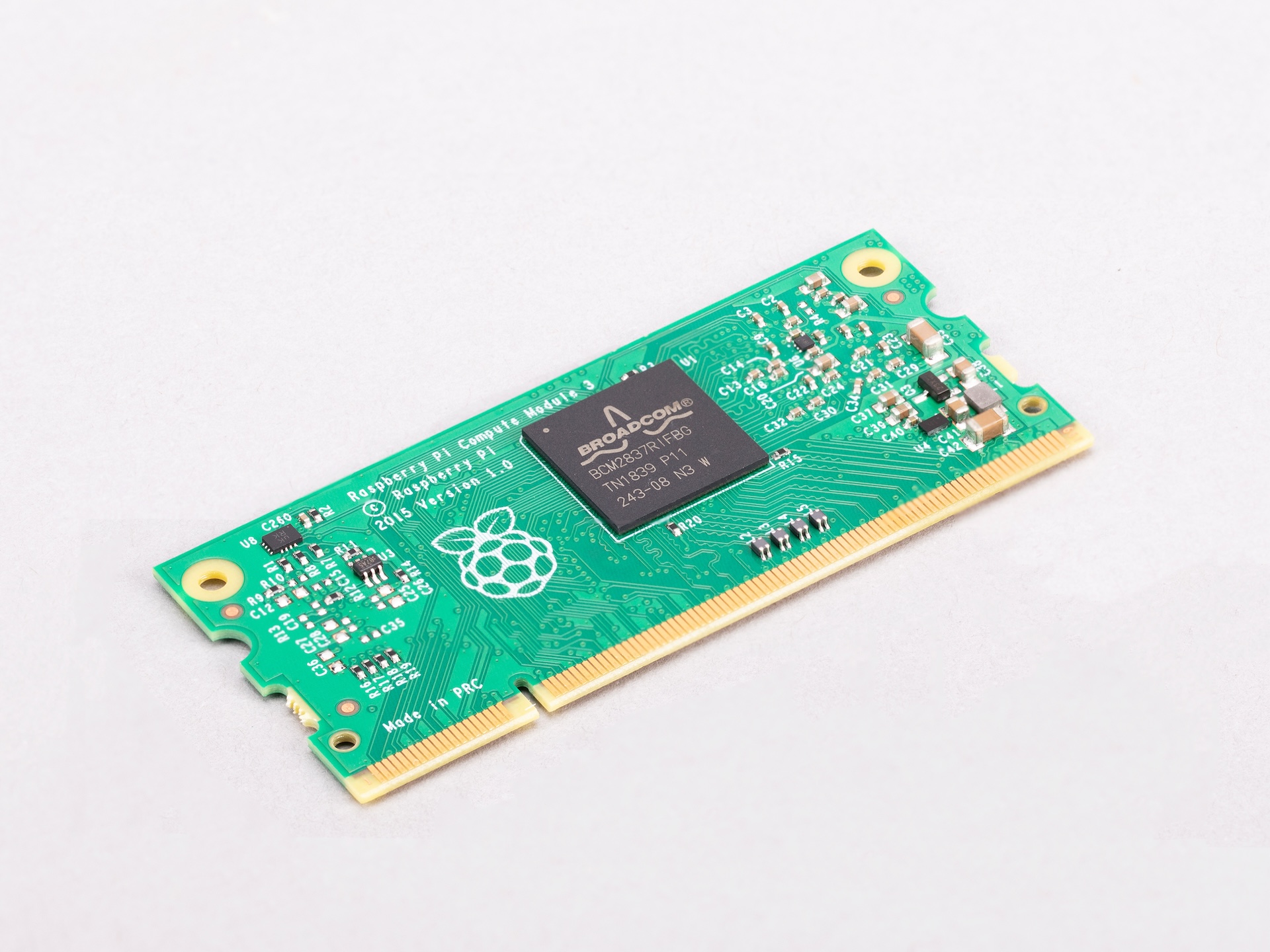 Raspberry Pi Compute Module 3 Raspberry Pi Compute Module 3 | BCM2837 | 1GB | 0GB (精简版) 4GB | DDR2 SODIMM | 无 |
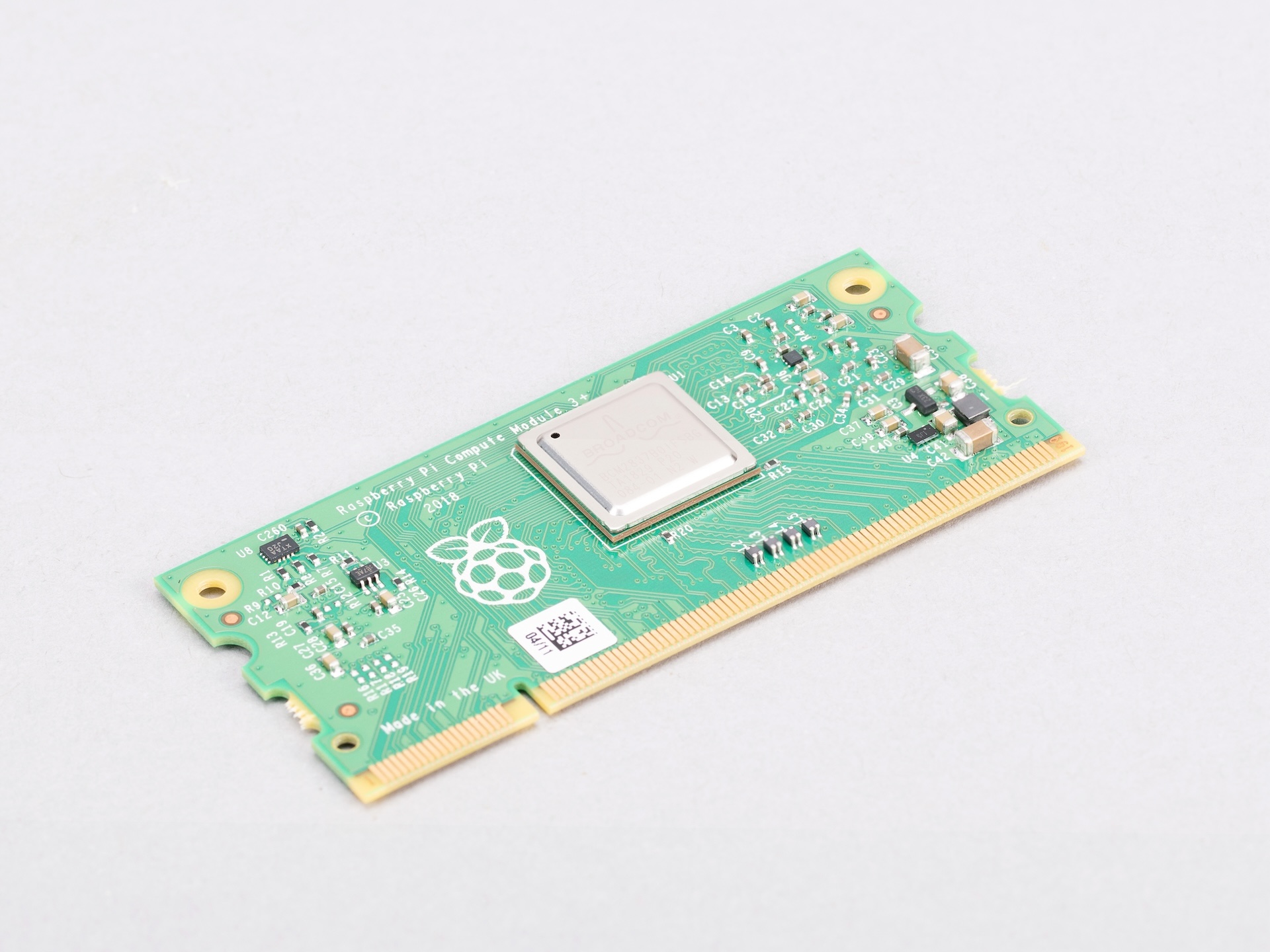 Raspberry Pi Compute Module 3+ Raspberry Pi Compute Module 3+ | BCM2837B0 | 1GB | 0GB (精简版) 8GB 16GB 32GB | DDR2 SODIMM | 无 |
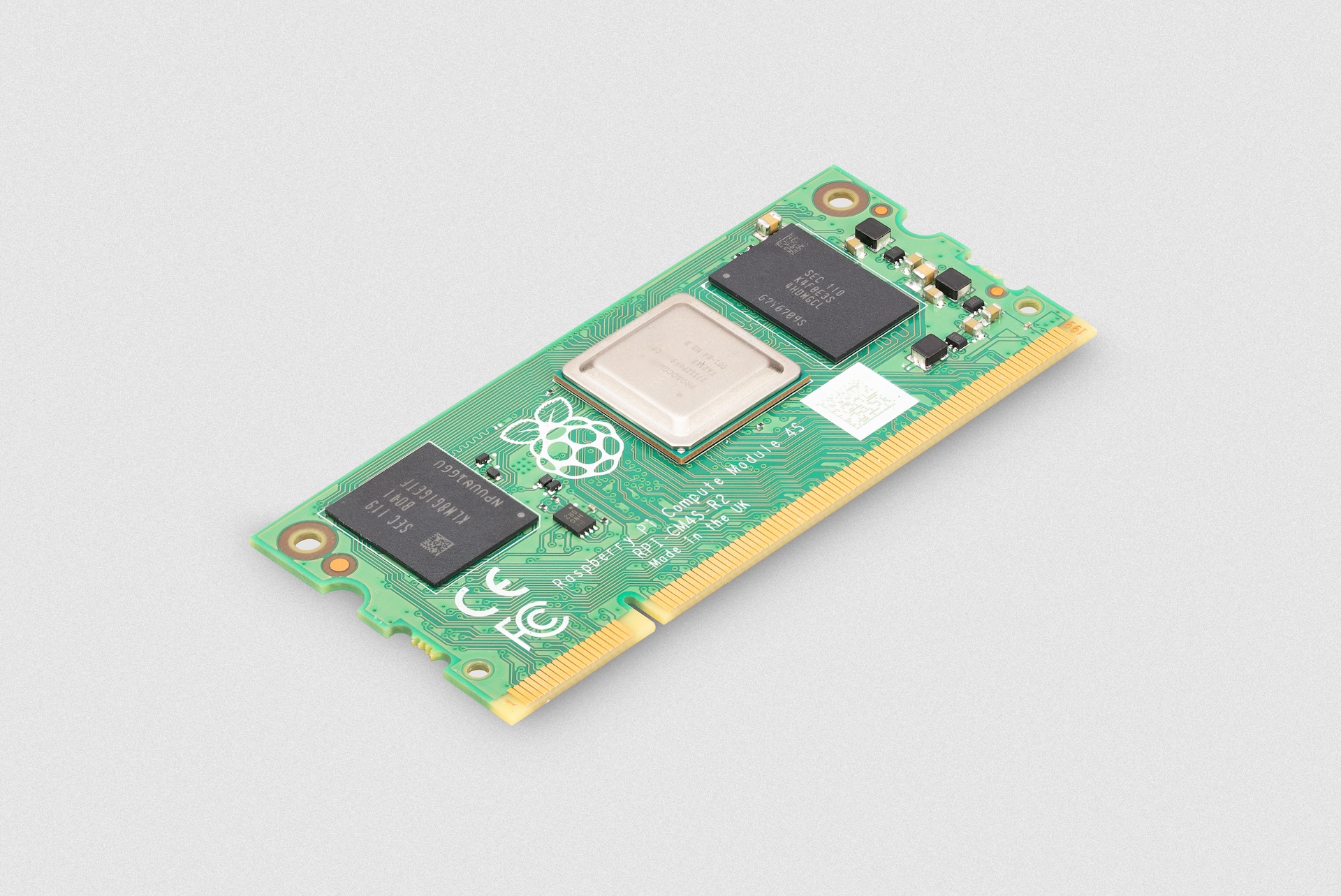 Raspberry Pi Compute Module 4S Raspberry Pi Compute Module 4S | BCM2711 | 1GB 2GB 4GB 8GB | 0GB (精简版) 8GB 16GB 32GB | DDR2 SODIMM | 无 |
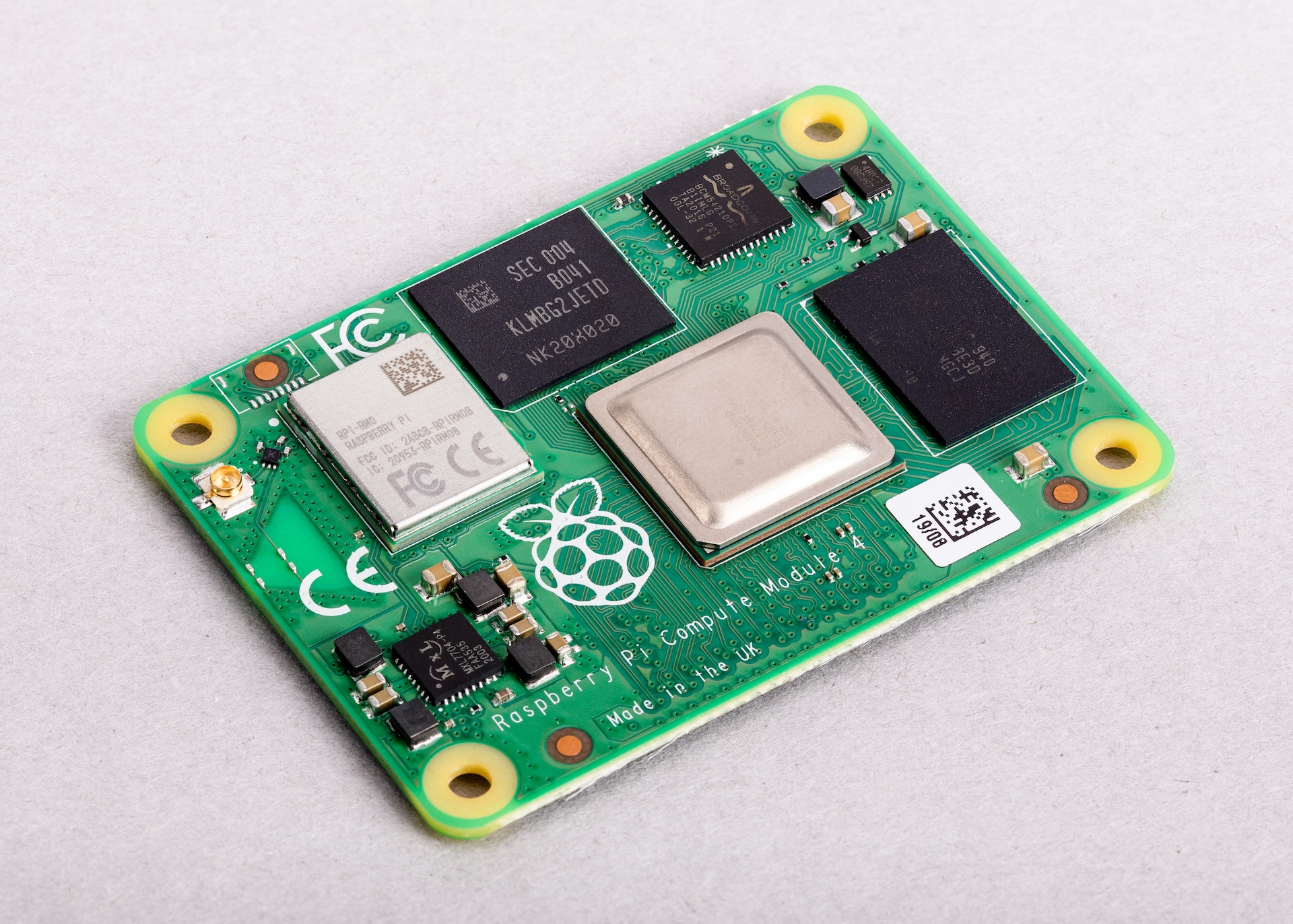 Raspberry Pi Compute Module 4 Raspberry Pi Compute Module 4 | BCM2711 | 1GB 2GB 4GB 8GB | 0GB (精简版) 8GB 16GB 32GB | 双 100 针高密度连接器 | 可选:
|
 Raspberry Pi Compute Module 5 Raspberry Pi Compute Module 5 | BCM2712 | 2GB 4GB 8GB 16GB | 0GB (精简版) 16GB 32GB 64GB | 双 100 针高密度连接器 | 可选:
|
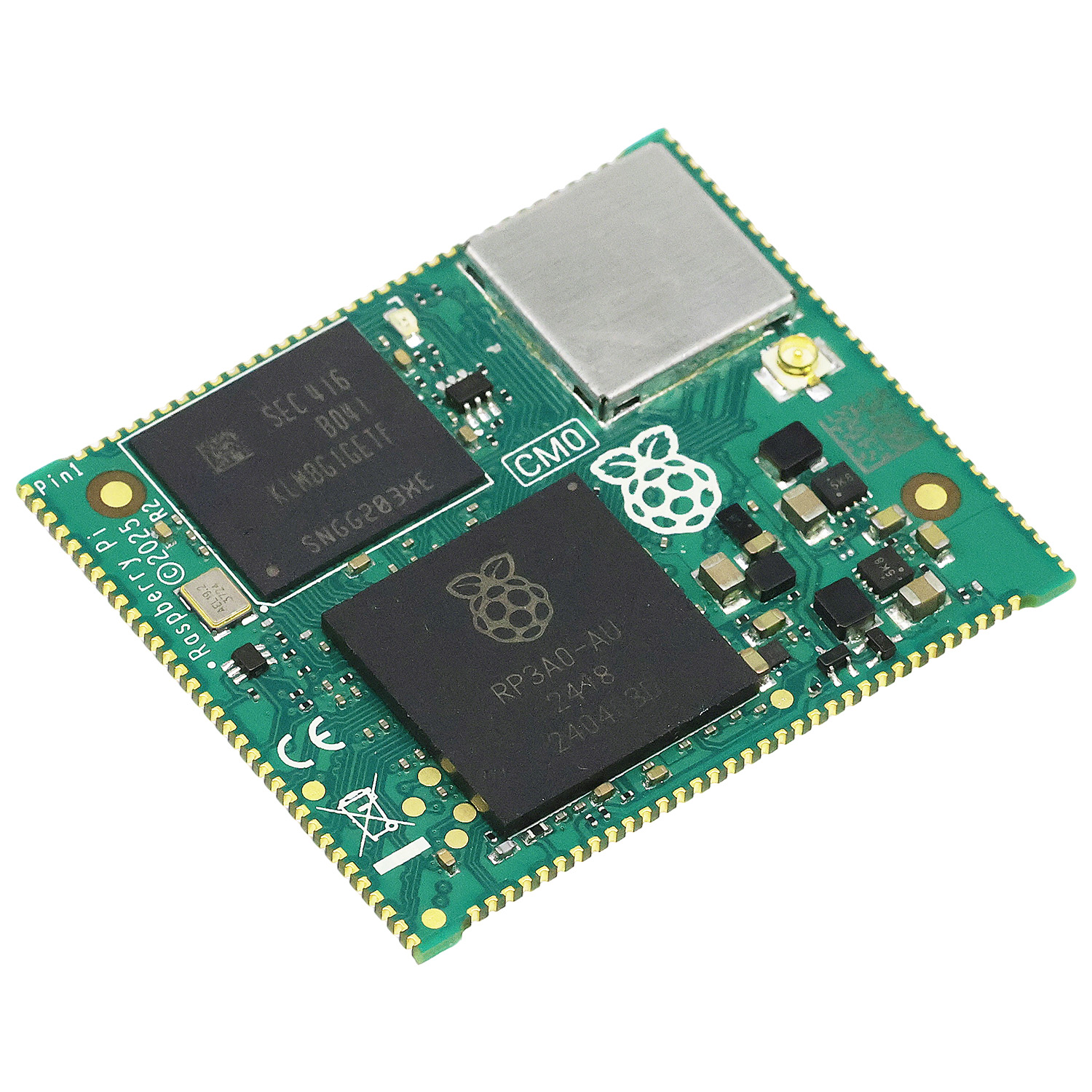 Raspberry Pi Compute Module 0 Raspberry Pi Compute Module 0 | RP3A0 | 512MB | 0GB (精简版) 8GB 16GB | 132引脚 39*33mm封装 | 可选:
|
使用 DDR2 SO-DIMM 物理外形尺寸的计算模块与 DDR2 SODIMM 电气规格不兼容。
Pico微控制器
后缀为 H 的型号已将接头引脚预焊接到 GPIO 接头。没有后缀 H 的型号不附带连接到 GPIO 针座的针座引脚;用户必须手动焊接引脚或安装第三方引脚套件。
| 型号 | SoC | 内存 | 存贮 | GPIO | 无线连接 |
|---|---|---|---|---|---|
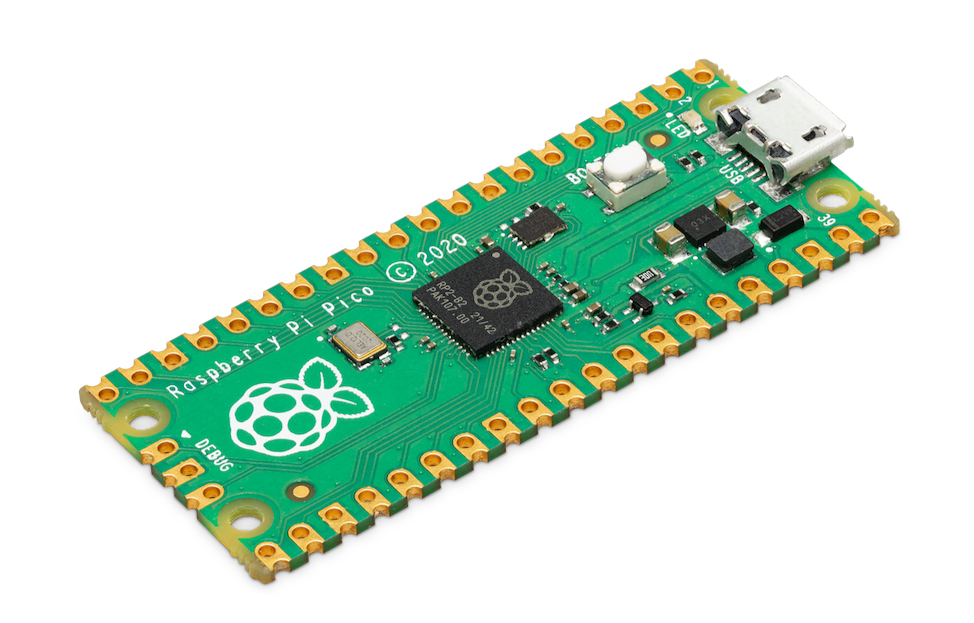 Raspberry Pi Pico Raspberry Pi Pico | RP2040 | 264kB | 2MB | 2个20针GPIO头(未填充) | 无 |
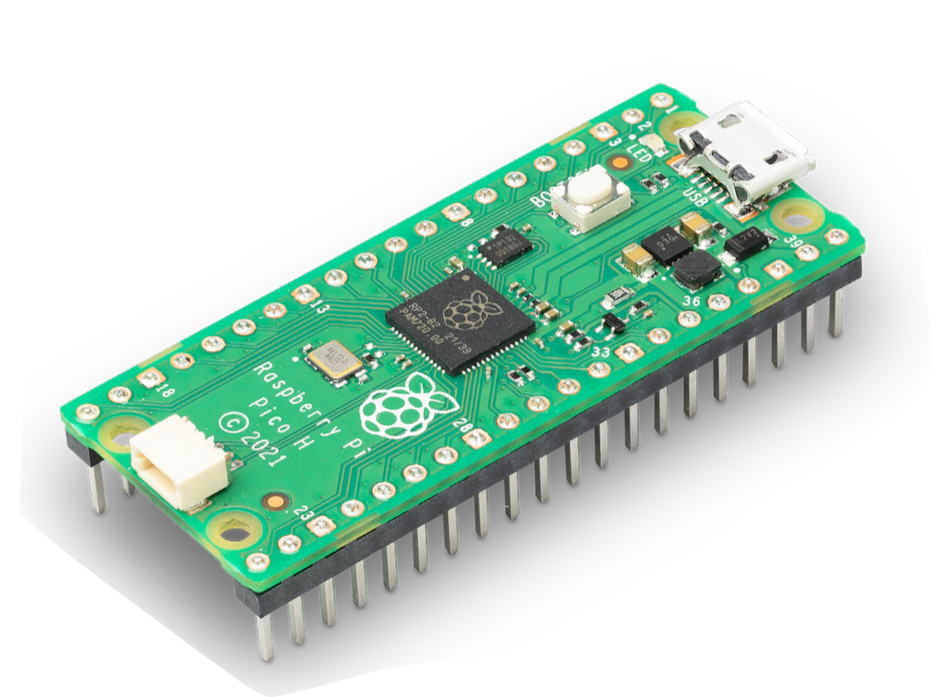 Raspberry Pi Pico H Raspberry Pi Pico H | RP2040 | 264kB | 2MB | 2个20针GPIO头 | 无 |
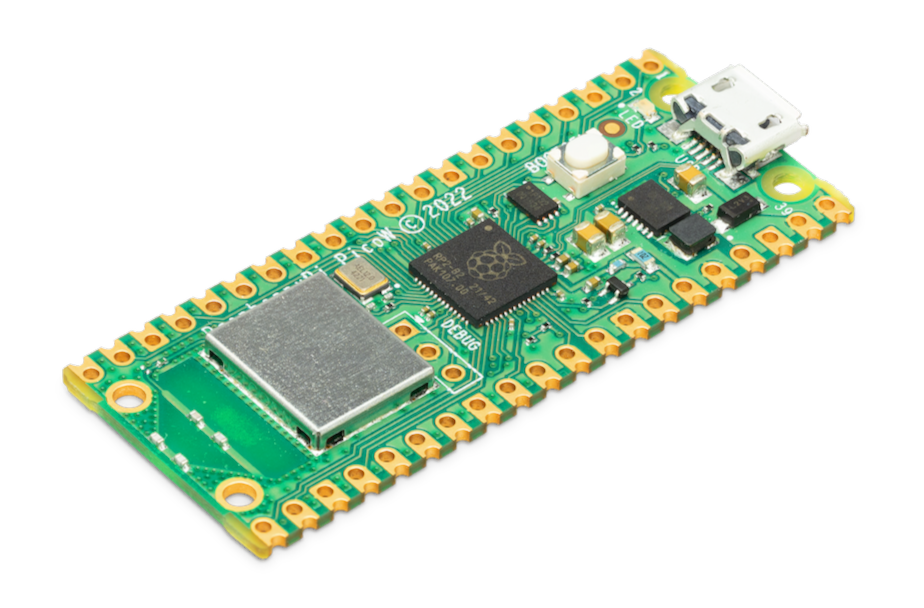 Raspberry Pi Pico W Raspberry Pi Pico W | RP2040 | 264kB | 2MB | 2个20针GPIO头(未填充) |
|
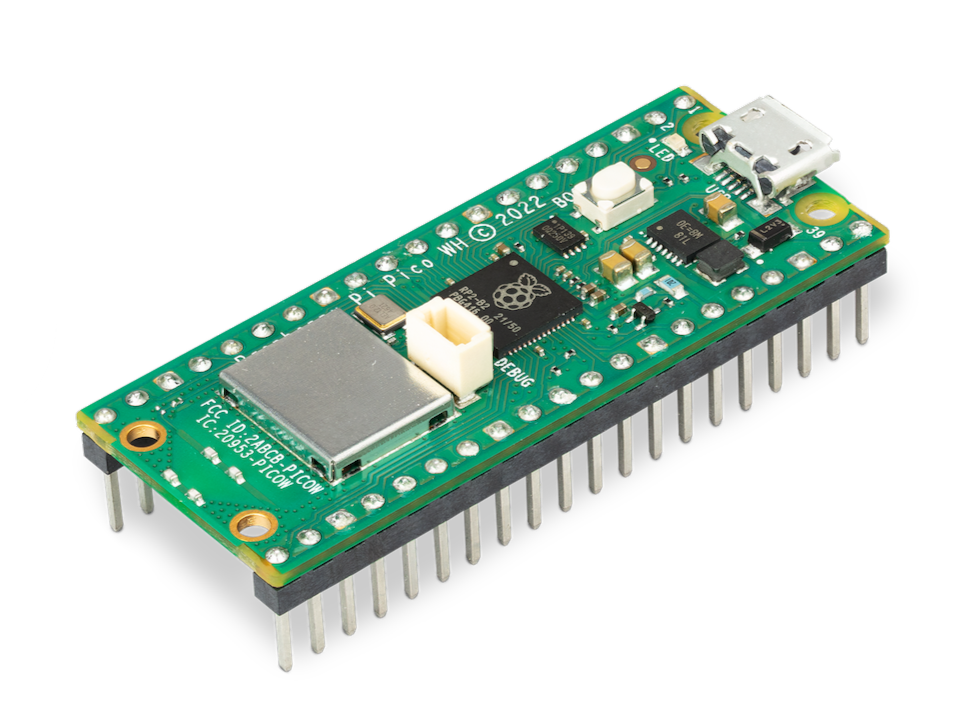 Raspberry Pi Pico WH Raspberry Pi Pico WH | RP2040 | 264kB | 2MB | 2个20针GPIO头 |
|
 Raspberry Pi Pico 2 Raspberry Pi Pico 2 | RP2350 | 520kB | 4MB | 2个20针GPIO头(未填充) | 无 |
 Raspberry Pi Pico 2 W Raspberry Pi Pico 2 W | RP2350 | 520kB | 4MB | 2个20针GPIO头(未填充) |
|
 Raspberry Pi Pico 2 with headers Raspberry Pi Pico 2 with headers | RP2350 | 520kB | 4MB | 2个20针GPIO头(未填充) | 无 |
 Raspberry Pi Pico 2 W with headers Raspberry Pi Pico 2 W with headers | RP2350 | 520kB | 4MB | 2个20针GPIO头(未填充) |
|
有关 Raspberry Pi Pico 型号的更多信息,请参阅 Pico 文档。
原理图和机械图
各种树莓派板版本的原理图:
树莓派5
树莓派4B
树莓派3B+
树莓派3A+
树莓派3B
树莓派2B
树莓派1B+
树莓派3A+的机械图也适用于树莓派1A+。
树莓派1 型号 A+
树莓派Zero
树莓派Zero W
树莓派Zero 2W
测试焊盘位置
树莓派Zero 2W有许多在电路板生产过程中使用的测试焊盘位置。
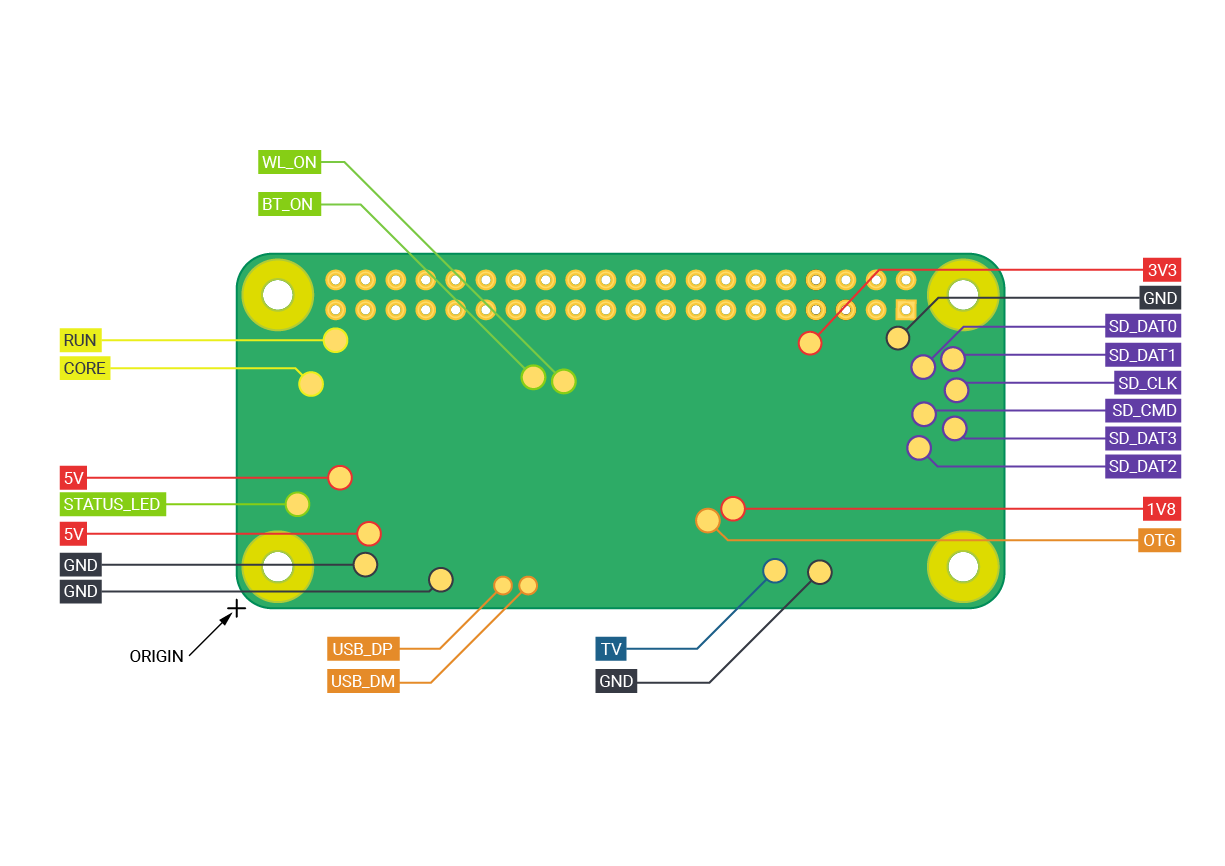
原点:左下角ORIGIN所示位置
| 标签 | 功能 | X(距离原点毫米) | Y(距离原点毫米) |
|---|---|---|---|
| STATUS_LED | 电源状态(低=ON) | 5.15 | 8.8 |
| CORE | 处理器电源 | 6.3 | 18.98 |
| RUN | 连接到GND复位 | 8.37 | 22.69 |
| 5V | 5V输入 | 8.75 | 11.05 |
| 5V | 5V输入 | 11.21 | 6.3 |
| GND | 接地引脚 | 10.9 | 3.69 |
| GND | 接地引脚 | 17.29 | 2.41 |
| USB_DP | USB端口 | 22.55 | 1.92 |
| USB_DM | USB端口 | 24.68 | 1.92 |
| OTG | OTG引脚 | 39.9 | 7.42 |
| 1V8 | 1.8V模拟电池 | 42.03 | 8.42 |
| TV | 复合电视输出 | 45.58 | 3.17 |
| GND | 接地引脚 | 49.38 | 3.05 |
| GND | 接地引脚 | 55.99 | 22.87 |
| 3V3 | 3.3V IO电源 | 48.55 | 22.44 |
| SD_CLK | SD卡时钟引脚 | 60.95 | 18.45 |
| SD_CMD | SD卡命令引脚 | 58.2 | 16.42 |
| SD_DAT0 | SD卡数据引脚 | 58.13 | 20.42 |
| SD_DAT1 | SD卡数据引脚 | 60.65 | 21.1 |
| SD_DAT2 | SD卡数据引脚 | 57.78 | 13.57 |
| SD_DAT3 | SD卡数据引脚 | 60.8 | 15.22 |
| BT_ON | 蓝牙电源状态 | 25.13 | 19.55 |
| WL_ON | WiFi电源状态 | 27.7 | 19.2 |
产品合规性与安全性
所有树莓派产品都经过了广泛的合规性测试,有关更多信息,请参阅产品信息门户
可燃性等级
树莓派设备中使用的PCB符合UL94-V0标准。
仅适用于PCB。
树莓派合规性支持
合规性支持计划旨在消除企业在处理合规性问题时的负担,使其更轻松地向消费者推出新产品。通过该计划,企业可以与在树莓派合规性测试期�间参与测试的工程师取得联系,从而与UL的专业团队建立联系,该团队凭借对树莓派的深入了解,对企业的产品进行评估和测试。
了解有关树莓派合规性支持计划的更多信息。
"Powered by 树莓派" 徽标
"Powered by 树莓派"计划为希望使用树莓派徽标形式的公司提供了一个流程,涵盖了内置树莓派计算机或芯片的产品以及由树莓派提供的服务。如果您希望开始流程,您可以在线申请。
核准的设计合作伙伴
我们的 认可设计合作伙伴 列表提供了一系列与我们密切合作并为我们提供支持的咨询公司,这些公司可以在硬件、软件和机械领域提供有偿设计服务。
频率管理和热控制
所有型号的 Raspberry Pi 都进行了一定程度的热管理,以避免在大负荷下过热。SoC 有一个内部温度传感器,GPU 上的软件会对其进行轮询,以确保温度不超过我们为所有型号设定的 85°C 上限。可以将其设置为更低的值,但不能设置为更高的值。当设备接近极限值时,芯片(Arm、GPU)上使用的各种频率和电压会降低。这样可以减少产生的热量,从而控制温度。
当核心温度在80°C到85°C之间时,Arm核心将逐渐降低温度。如果温度达到85°C,Arm内核和GPU都会受到限制。
树莓派3B+及之后PCB技术已发生变化,以提供更好的散热并增加散热效率。此外还引入了软温度限制,目的是最大限度地延长设备在达到85°C硬限制之前"冲刺"的时间。当达到软限制时,时钟速度从1.4GHz降低到1.2GHz,并且工作电压略有降低。这减缓了温度上升的速度:我们将1.4GHz限制到1.2GHz以换取更长的工作时间。默认情况下软限制为60°C,可以通过config.txt中的temp_soft_limit中的设置更改此值。
树莓派4B继续采用与树莓派3B+相同的PCB技术,有助于散发多余的热量。目前没有定义软限制。
使用DVFS
有关 DVFS 的讨论仅适用于 4 系列设备(Raspberry Pi 4、Compute Module 4 和 Pi 400)。
Raspberry Pi 4 设备实现了动态电压和频率缩放(DVFS)。这项技术允许 4 系列设备在较低温度下运行,同时仍能提供相同的性能。
SoC内部的各种时钟(例如Arm、Core、V3D、ISP、H264、HEVC)由固件监控,每当它们没有全速运行时,提供给由时钟驱动的芯片特定部分的电压相对于全速的降低而言有所降低。实际上,仅提供够用的电压来保持模块以其运行的特定速度正确运行。这可以显着减少SoC的功耗,从而减少产生的总热量。
由于运行欠压可能会导致系统稳定性问题,尤其是在使用欠压固定时钟外设(例如PCIe)时,因此提供了三种 DVFS 模式,并且可以使用/boot/firmware/config.txt以下属性进行配置。大多数系统应该使用dvfs=3,无显示器系统可能会受益于小幅功耗降低,但dvfs=1存在PCIe稳定性问题的风险。
| 属性=值 | 描述 |
|---|---|
| dvfs=1 | 允许欠压 |
| dvfs=2 | 默认工作频率的固定电压 |
| dvfs=3 | 根据超频的需要调整电压(默认)。如果在config.txt中指定over_voltage,则禁用动态电压调节,导致系统恢复到dvfs=2 |
在 5 系列设备上取消了这一设置,实际上始终为模式 3。
此外,还使用了更细粒度的分级CPU调速器来对Arm核心频率进行控制,这意味着DVFS更有效。现在的步进为1500MHz、1000MHz、750MHz和 600MHz。当 SoC 被节流时,这些步骤也可以提供帮助,并且意味着完全节流到 600MHz 的可能性要小得多,从而全面提高满载性能。
默认的CPU调控器是ondemand,可以使用cpufreq-set命令(来自cpufrequtils包)手动更改调控器以减少空闲功耗:
sudo apt install cpufrequtils
sudo cpufreq-set -g powersave
测量温度
由于 Raspberry Pi 设备上使用的 SoC 架构以及 Raspberry Pi OS 发行版中使用的上游温度监控代码,基于 Linux 的温度测量可能不准确。然而,vcgencmd 命令可以直接与 GPU 通信,从而准确、即时地读取当前 SoC 的温度:
vcgencmd measure_temp
添加散热片
由于内置节流功能,因此不需要散热片来防止 SoC 过热损坏。不过,散热片或小型风扇可以减少热节流并提高性能。垂直安装 Raspberry Pi 可获得最佳气流,从而略微改善散热。
风扇盒
为确保 Raspberry Pi 的最佳性能,请使用主动冷却解决方案,如风扇。Raspberry Pi 固件可管理所有官方风扇的风速。
Raspberry Pi 4 风扇
对于 Raspberry Pi 4,请将 Raspberry Pi 4 外壳风扇 添加到 Raspberry Pi 4 外壳的盖子上。
Raspberry Pi 5 风扇
对于 Raspberry Pi 5,请使用其中一个官方风扇选项:
Raspberry Pi 5 的两个风扇都插入了位于电路板右上方 40 针 GPIO 接头和 USB 2 端口之间的四针 JST-SH PWM 风扇接头。风扇连接器的电流限制与 USB 外围设备相同。我们向超频者推荐 Active Cooler 盒子,因为它能提供更好的散热性能。
当 Raspberry Pi 5 的温度升高时,风扇的反应如下:
- 低于 50°C,风扇不旋转(0% 速度)
- 50°C时,风扇以低速运转(30%速度)
- 60°C时,风扇速度增加至中速(50%速度)
- 67.5°C时,风扇转速增至高速(70%转速)
- 75°C时,风扇升至全速(100%速度)
温度下��降使用相同的映射,滞后温度为 5°C;当温度下降到低于上述每个阈值 5°C 时,风扇转速下降。
上述温度、迟滞和转速数值可通过调整各种 fan_tempN、fan_tempN_hyst 和 fan_tempN_speed dtoverlay 设置进行调节(其中 N 取值为 0、1、2 或 3)。详见覆盖层README文件获取完整说明。例如,在/boot/firmware/config.txt中添加dtparam=fan_temp0=55000,将使风扇保持关闭状态,直至树莓派5的温度达到55°C。
启动时,风扇打开,并检查转速计输入,查看风扇是否在转动。如果是,则启用 cooling_fan 设备树覆盖。该覆盖层默认位于 bcm2712-rpi-5-b.dtb,但status=disabled。
Raspberry Pi 5 风扇连接器引脚说明
Raspberry Pi 5 风扇连接器是一个 1 毫米间距的 JST-SH 插座,包含以下四个引脚:
| 引脚 | 功能 | 导线颜色 |
|---|---|---|
| 1 | +5V | 红色 |
| 2 | PWM | 蓝色 |
| 3 | GND | 黑色 |
| 4 | 转速器 | 黄色 |
树莓派启动EEPROM
以下 Raspberry Pi 型号使用 EEPROM 启动系统:
- 自 Raspberry Pi 4B 起的旗舰机型
- 从 CM4 开始的计算模块型号(包括 CM4S)
- 自 Raspberry Pi 400 起的键盘型号
所有其他型号的 Raspberry Pi 计算机都使用位于启动文件系统中的 bootcode.bin 文件。
您可以在 rpi-eeprom GitHub 代码库 中找到用于创建 rpi-eeprom 的脚本和预编译二进制文件。
重置 Raspberry Pi 引导加载程序
本节提供通过重新刷写引导加载程序来重置它的说明。通常在系统无法启动时恢复系统,或重置引导加载程序配置时会这样做。
如果您不是要重置引导加载程序,而是想升级引导加载程序版本或选择不同的启动顺序,请参阅 配置 页面的 更新引导加载程序。
以下说明仅适用于在板载 SPI flash EEPROM 中存储引导加载程序的较新树莓派型号:
- 自树莓派 4B 起的旗舰单板计算机 (SBC)。
- 自 CM4 起的计算模块(包括 CM4S)。
- 所有键盘电脑(树莓派 400、500 和 500+)。
在其他树莓派型号上,引导 ROM 始终会加载位于启动介质引导分区中的 bootcode.bin 文件。
诊断引导加载程序问题
如果您的树莓派设备无法启动,引导加载程序会通过以下方式提供反馈:
- LED 活动。 树莓派上的绿色 LED 可通过特定的闪烁模式指示特定错误。请查看 LED 警告闪烁代码 以根据闪烁模式识别错误。例如,绿色 LED 短闪七次表示未找到内核镜像。
- HDMI 诊断屏幕。 在较新的设备上,引导加载程序可以在启动期间通过 HDMI 显示诊断屏幕。如果您的树莓派连接了显示器,该屏幕会提供引导加载程序版本和构建日期、检测到的启动顺序以及在操作系统加载失败时的具体错误代码等信息。更多信息请参阅 启动诊断。
重新刷写引导加载程序
如果您的系统无法启动或您想重置引导加载程序配置,请重新刷写引导加载程序。重新刷写引导加载程序会清除可能导致树莓派无法启动的本地引导加载程序配置。
您也可以通过 USB rpiboot 重新刷写引导加载程序。此方法通常用于批量配置计算模块。通过 USB 重新刷写引导加载程序也是 CM4 和 CM4S 唯一可用的选项。更多信息请参阅 计算模块硬件。
要在您的树莓派设备上重新刷写引导加载程序:
- 将一个备用或空白的 microSD 存储设备连接到您的主机电脑。
- 在主机电脑上找到并打开 Imager。
- 在 设备 选项卡中,从列表中选择您的树莓派型号,然后选择 下一步。
- 在 操作系统 选项卡中,滚动到列表底部并选择 Misc utility images > Bootloader > SD Card Boot,然后选择 下一步。
- 在 存储 选项卡中,选择您的存储设备,然后选择 下一步。
- 在 写入 选项卡中,选择 写入。
- 选择 我已知晓,擦除并写入;等待写入完成,然后选择 完成。
- 从主机电脑中弹出存储设备,然后插入您的树莓派。
- 通过接通电源启动树莓派。
- 当绿色活动 LED 以稳定模式闪烁且 HDMI 显示屏显示绿色屏幕后,断开电源关闭树莓派并弹出启动介质。
更新 bootloader 配置
default (默认) 版本的 bootloader 代表最新的出厂默认固件映像。它提供关键错误修复和硬件支持,并在 latest 版本中的功能经过测试后定期更新。
高级用户可以切换到 latest bootloader 以获得最新功能。
首先,确保 Raspberry Pi 运行最新的软件。运行以下命令进行更新:
sudo apt update && sudo apt full-upgrade
接下来,运行以下命令打开 raspi-config:
sudo raspi-config
浏览至 Advanced Options>Bootloader Version。选择Latest,然后选择 Yes 确认。选择 Finish 并确认要重新启动。
如果您运行rpi-eeprom-update,您应该会看到更新版本的 bootloader 可用并且它是 latest 发布版本。
*** UPDATE AVAILABLE ***
BOOTLOADER: update available
CURRENT: Thu 18 Jan 13:59:23 UTC 2024 (1705586363)
LATEST: Mon 22 Jan 10:41:21 UTC 2024 (1705920081)
RELEASE: latest (/lib/firmware/raspberrypi/bootloader-2711/latest)
Use raspi-config to change the release.
VL805_FW: Using bootloader EEPROM
VL805: up to date
CURRENT: 000138c0
LATEST: 000138c0
现在您可以更新 bootloader。
sudo rpi-eeprom-update -a
sudo reboot
重新启动,然后运行rpi-eeprom-update。您现在应该看到日期CURRENT已更新为bootloader的最新版本:
BOOTLOADER: up to date
CURRENT: Mon 22 Jan 10:41:21 UTC 2024 (1705920081)
LATEST: Mon 22 Jan 10:41:21 UTC 2024 (1705920081)
RELEASE: latest (/lib/firmware/raspberrypi/bootloader-2711/latest)
Use raspi-config to change the release.
VL805_FW: Using bootloader EEPROM
VL805: up to date
CURRENT: 000138c0
LATEST: 000138c0
读取当前 bootloader 配置
要查看当前运行的 bootloader 所使用的配置,请运行以下命令:
`rpi-eeprom-config`
从 bootloader 映像读取配置
要从 bootloader 映像读取配置:
rpi-eeprom-config pieeprom.bin
编辑当前 bootloader 配置
以下命令将当前 bootloader 配置加载到文本编辑器中。当编辑器关闭时,rpi-eeprom-config 将更新的配置应用到最新可用的 bootloader 版本,并用于 rpi-eeprom-update 在系统重新启动时安排更新:
sudo -E rpi-eeprom-config --edit
sudo reboot
如果更新后的配置无更改或为空,则不进行任何更改。
编辑器是通过 EDITOR 环境变量选择的。
应用已保存的配置
以下命令应用 boot.conf 的配置于最新的可用 bootloader 映像,并在rpi-eeprom-update在系统重新启动时安排更新。
sudo rpi-eeprom-config --apply boot.conf
sudo reboot
自动更新
rpi-eeprom-update systemd 服务在启动时运行,并在新映像可用时应用更新,自动迁移当前的 bootloader 配置。
要禁用自动更新:
sudo systemctl mask rpi-eeprom-update
�要重新启用自动更新:
sudo systemctl unmask rpi-eeprom-update
如果设置了 FREEZE_VERSION] bootloader 配置,那么更新服务将跳过任何自动更新。这样,如果安装了多个操作系统,或交换 SD 卡时,就无需单独禁用更新服务了。
rpi-eeprom-update
树莓派OS使用rpi-eeprom-update脚本来实现自动更新服务。该脚本还可��以交互运行或打包以创建自定义bootloader更新服务。
读取当前 EEPROM 版本:
vcgencmd bootloader_version
检查是否有可用更新:
sudo rpi-eeprom-update
安装更新:
sudo rpi-eeprom-update -a
sudo reboot
取消挂起��的更新:
sudo rpi-eeprom-update -r
安装特定的bootloader EEPROM 映像:
sudo rpi-eeprom-update -d -f pieeprom.bin
该-d参数指示rpi-eeprom-update使用指定映像文件中的配置,而不是自动迁移当前配置。
显示内置文档:
rpi-eeprom-update -h
A/B bootloader 更新
A/B EEPROM bootloader 更新可防止树莓派设备在更新中断后无法启动——即使设备在更新过程中断电,也能保护设备。
支持 A/B 的固件将 EEPROM 分为两个分区:A 和 B。在任何时候,其中一个分区是"已提交"的,是设备默认启动的分区。更新会写入另一个分区,在新映像完整写入并校验完毕之前,已提交的分区保持不变。
此功能仅适用于树莓派 5、树莓派 Compute Module 5 和树莓派 5 键盘电脑设备。
支持 A/B 的固件还支持 tryboot 回滚机制,可在提交前测试新分区。更多信息请参阅 rpi-eeprom-ab README。
有关 Raspberry Pi OS 的 A/B 更新信息,请参阅 A/B 启动更新。
启用 A/B bootloader 更新
注意:启用 A/B 固件更新后,直接写入 EEPROM 的工具(如 flashrom)将不再可用。
要使用 raspi-config 启用或禁用 A/B 固件更新:
. 在命令行中,运行以下命令将 Raspberry Pi 软件更新到最新版本: +
sudo apt update && sudo apt full-upgrade
. 在命令行中,运行以下命令打开 raspi-config:
+
sudo raspi-config
. 导航到 6 Advanced Options > A14 AB Firmware 并选择 Enable 或 Disable。
. 选择 Finish 并在提示时重启。
. 在命令行中,运行以下命令执行 A/B 更新。
+
rpi-eeprom-update
bootloader 发布状态
固件发布状态对应于bootloader固件映像的特定子目录(/lib/firmware/raspberrypi/bootloader/...),并且可以更改以选择不同的发布流。
default– 更新了新硬件支持、关键错误修复以及已通过latest版本测试的新功能的定期更新。latest– 当新功能可用时进行更新。
由于发布状态字符串只是一个子目录名称,因此可以创建您自己的发布流,例如固定发布或自定义网络启动配置。
更改 bootloader 版本
您可以通过编辑 /etc/default/rpi-eeprom-update 文件并将 FIRMWARE_RELEASE_STATUS 条目更改为适当的流来改变更新期间要使用的发布流。
更新 bootloader 映像文件中的 bootloader 配置
以下命令将 pieeprom.bin 中的 bootloader 配置替换为 boot.conf,并将新映像写入 new.bin:
rpi-eeprom-config --config boot.conf --out new.bin pieeprom.bin
recovery.bin
开机时,BCM2711和BCM2712上的ROM会在SD卡上启动分区的根目录中查找名为 recovery.bin 的文件。如果找到有效的 recovery.bin ,ROM将执行该文件而不是EEPROM的内容。这种机制可确保始终将 bootloader 映像重置为具有出厂默认设置的有效映像。
请参阅树莓派启动流程
bootloader 更新文件
| 文件名 | 目的 |
|---|---|
| recovery.bin | bootloader 恢复可执行文件 |
| pieeprom.upd | bootloader EEPROM 映像 |
| pieeprom.bin | bootloader EEPROM 映像 – 与 pieeprom.upd 相同,但更改了 recovery.bin 行为,使其不会重命名为 RECOVERY.000 。 |
| pieeprom.sig | 引导加载程序映像(pieeprom.upd/pieeprom.bin)的sha256校验和(及可选时间戳) |
| vl805.bin | VLI805 USB固件 EEPROM 映像 – 仅限树莓派4B Rev1.3及更早版本 |
| vl805.sig | vl805.bin的sha256校验和 |
- 如果bootloader更新映像名为
pieeprom.upd,那么更新完成后,recovery.bin将重命名为recovery.000,然后重新启动系统。由于recovery.bin已不存在,ROM会从SPI闪存中加载新更新的bootloader,操作系统会正常启动。 - 如果bootloader更新映像名为
pieeprom.bin,那么recovery.bin将在更新完成后停止。更新成功后,HDMI输出将变为绿色,绿色活动LED快速闪烁。如果更新失败,HDMI输出将变为红色,活动LED将显示错误代码。 .sig文件的第一行包含对应映像文件的十�六进制sha256校验和,可选地在下一行跟随映像的时间戳(ts: unixtime);未来可能添加更多字段。- BCM2711和BCM2712上的ROM不支持从USB大容量存储器或TFTP加载
recovery.bin。相反,较新版本的bootloader支持自更新机制,bootloader可自行重新刷新EEPROM。请参阅bootloader配置页面上的ENABLE_SELF_UPDATE。 - 启动时,
rpi-eeprom-update服务会自动删除临时EEPROM更新文件。
有关 rpi-eeprom-update 配置文件的更多信息,请参阅 rpi-eeprom-update -h。
EEPROM 写保护
bootloader 和 VLI EEPROM 都支持硬件写保护。有关如何在刷新EEPROM时启用此功能的更多信息,请参阅eeprom_write_protect选项。
启动诊断
Raspberry Pi 4 或更高版本旗舰机型的 bootloader 可以在启动时在 HDMI 显示屏上显示诊断信息。要查看诊断信息,请关闭 Raspberry Pi 的电源,断开启动媒体(通常是 SD 卡或 SSD),然后重新启动。如果您的 Raspberry Pi 连接到显示器,您应该能看到类似下面的诊断信息:

如果 bootloader 无法从任何引导介质或网络引导启动,也会出现此诊断页面。如果引导介质上没有可引导映像��、引导介质有缺陷或网络引导参数不正确,就会出现这种情况。
要在显示诊断页面时重新启动,请对设备进行电源循环。您可以断开电源然后重新连接,或者按住电源按钮(如果设备有)。
顶部一行描述了树莓派的型号及其内存容量。二维码是下载页面的链接。
诊断信息如下:
| 线 | 信息 |
|---|---|
| bootloader | Bootloader git版本 - RO(如果EEPROM被写保护) - 软件构建日期 |
| update-ts | 与EEPROM配置更新时间相对应的时间戳。在自更新模式下检查此时间戳以避免更新到旧配置 |
| secure-boot | 如果启用了安全启动,则显示处理器版本(B0/C0)和签名启动状态标志。否则,该行为空。 |
| board | 主板版本- 序列号 - 以太网MAC地址 |
| boot | mode(当前启动模式名称和编号)order(BOOT_ORDER配置)retry(当前启动模式中的重试次数)restart(启动模式列表的循环次数) |
| SD | SD卡检测状态(检测到/未检测到) |
| part | 主引导记录主分区类型:LBA |
| fw | start.elf 和 fixup.dat 的文件名(如果存在)(例如 start4x.elf、fixup4x.dat) |
| net | 网络启动: 链路状态(上/下) 客户端IP地址(ip)、子网(sn)、默认网关(gw) |
| tftp | 网络启动:TFTP服务器IP地址 |
| display | 指示是否检测到热插拔(HPD=1),如果是,则表示是否已成功读取每个HDMI输出的EDID(EDID=ok) |
要禁用诊断显示,请使用 bootloader 配置中的 DISABLE_HDMI 选项。
树莓派启动模式
树莓派有许多不同的启动阶段。本文档解释了启动模式的工作原理以 Linux引导支持哪些模式。
特殊bootcode.bin-only启动模式
基于BCM2837的树莓派(即1.2版树莓派2B、树莓派3B和树莓派3B+)可以执行USB主机和以太网启动(树莓派3A+ 没有内置以太网接口,因此无法进行网络启动)。此外,树莓派4之前的所有树莓派型号都可以使用bootcode.bin-only方法启用USB主机启动。
自 Raspberry Pi 4 起,旗舰设备不再使用 bootcode.bin 文件。相反,这些设备使用板载 EEPROM 芯片中的引导加载程序。有关详细信息,请参阅 EEPROM 启动流程 和 SPI 启动 EEPROM 文档。
将 SD 卡格式化为 FAT32,并复制最新的 bootcode.bin。SD 卡必须存在于 Raspberry Pi 中才能启动。从 SD 卡加载 bootcode.bin 后,Raspberry Pi 将继续使用 USB 主机模式启动。
这对于基于BCM2835和BCM2836芯片的树莓派1、2和Zero型号,以及树莓派3启动失败的情况都很有用(与烧入BCM2837A的启动代码相比,最新的 bootcode.bin 包含针对树莓派3B的额外错误修复)。
如果您遇到大容量存储设备仍然无法工作的问题,即使使用了这个 bootcode.bin,那么请在SD卡中添加一个名为 timeout 的新文件。这将把等待大容量存储设备初始化的时间延长至六秒。
bootcode.bin串口启用
适用于 Raspberry Pi 4 之前发布的电路板。
有关在树莓派4 bootloader上启用UART的信息,请参阅Bootloader配置。 有关使用 EEPROM bootloader 启用 UART 的信息,请参阅 bootloader 配置 文档。
可以启用早期阶段的 UART 来调试启动问题(对于上述仅使用 bootcode.bin 的启动模式非常有用)。要做到这一点,请确保您使用的是最新版本的固件(包括 bootcode.bin)。检查当前固件是否支持 UART:
strings bootcode.bin | grep BOOT_UART
要从 bootcode.bin 启用UART:
sed -i -e "s/BOOT_UART=0/BOOT_UART=1/" bootcode.bin
接下来,将合适的 USB 串口电缆连接到主机(Raspberry Pi 也可以,不过您可能会发现最简单的方法是使用 USB 串口电缆,因为它开箱即可使用,无需任何烦人的 config.txt 设置)。使用 Raspberry Pi 或计算模块上的标准引脚 6、8 和 10(GND、GPIO14、GPIO15)。
然后使用 Linux 或 macOS 上的screen 或 Windows 上的putty连接串口。
设置串口接收频率为 115200-8-N-1,然后启动 Raspberry Pi。 当 bootcode.bin 运行时,设备会立即输出串行数据。
USB启动模式
USB 有两种不同的启动模式:
- USB设备模式
- USB主机模式
固件会根据 OTP 位在启动时选择两种模式。有两个位控制 USB 启动。第一个位启用 USB 设备启动,默认为启用;第二个位启用 USB 主机启动。
如果 USB 主机启动模式位被设置,处理器就会读取 OTGID 引脚,以决定是作为主机启动(与任何 Raspberry Pi Model B/B+ 一样驱动为零)还是作为设备启动(保持浮动)。Raspberry Pi Zero 可以通过 USB 连接器访问 OTGID 引脚;而 Compute Module 则可以访问边缘连接器上的 OTGID 引脚。
其他一些 OTP 位允许某些 GPIO 引脚选择启动模式。
USB设备启动模式
USB 设备启动在 计算模块系列、Zero系列和 Model A 旗舰系列变体 上可用。
当这种启动模式被激活时(通常是在从 SD 卡启动失败之后),树莓派会将其 USB 端口设置为设备模式,并等待主机的 USB 复位。可以在 Github 上找到示例代码,说明主机需要如何与树莓派通信。
主机首先通过控制端点 0 向设备发送一个结构,其中包含启动的大小和签名(未启用安全性,因此不需要签名)。其次,向端点 1 发送代码(bootcode.bin)。最后,设备将回复以下代码之一:
0- 成功0x80- 失败
USB主机启动模式
主机启动仅适用于树莓派3B、3B+、3A+ 和 2B v1.2。树莓派3A+ 仅支持大容量存储器启动,不支持网络启动。
主机启动适用于 Compute Module 系列(自 Compute Module 3 起)、Zero 系列(自 Zero 2 W 起)、Raspberry Pi 2B(1.2 版)、Raspberry Pi 3B 和 所有的旗舰系列(自 Raspberry Pi 3B+ 起)。Raspberry Pi 3A+ 支持大容量存储器启动,但不支持网络启动。
USB 主机启动模式使用以下逻辑:
- 启用 USB 端口,等待 D+ 线被拉高,表明有 USB 2.0 设备(我们仅支持 USB2.0)
- 如果设备是USB Hub
- 启用Hub所有下游端口的电源
- 对每个端口循环最多两秒钟(如果设置了
program_usb_boot_timeout=1则为五秒钟)- 从复位中释放,等待 D+ 驱动高电平,以指示设备已连接
- 如果检测到设备:
- 发送 "获取设备描述符" 命令
- 如果
VID == SMSC&&PID == 9500- 将设备添加到以太网设备列表
- 如果
- 如果类接口 == 大容量存储器类
- 将设备添加到大容量存储设备列表
- 发送 "获取设备描述符" 命令
- 否则
- 枚举单个设备
- 遍历大容量存储设备列表
- 从大容量存储设备启动
- 查看以太网设备列表
- 从以太网启动
在 Raspberry Pi 3B、3A+ 和 3B+ 上,主机启动默认为禁用。要启用 USB 主机启动,请在 /boot/firmware/config.txt 的末尾添加一行包含 program_usb_boot_mode=1 的内容。
您对 OTP 所做的任何更改都是永久性的,无法撤销。
在 Raspberry Pi 3A+ 上,设置 OTP 位以启用 USB 主机启动模式将永久阻止 Raspberry Pi 以 USB 设备模式启动。
USB大容量存储启动
仅适用于树莓派2B v1.2、3A+、3B、3B+、4B、400 和零 2 W,以及树莓派计算模块 3、3+ 和 4。 适用于 自 Compute Module 3 起的 Compute Module 系列、自 Zero 2 W 起的 Zero 系列和 自 Raspberry Pi 2B(1.2 版)起的所有旗舰系列设备。
您可能希望从 USB 大容量存储设备(如闪存盘或 USB 硬盘)启动 Raspberry Pi。在连接 USB 设备(尤其是硬盘和固态硬盘)时,请注意它们的电源要求。如果您计划在 Raspberry Pi 上连接一个以上的固态硬盘或硬盘,通常需要外接电源--供电硬盘盒或供电 USB 集线器。
Raspberry Pi 4B 之前的型号存在已知问题,无法使用某些 USB 设备启动。
带有EEPROM bootloader的设备
只要在 BOOT_ORDER 配置中指定 USB 启动,Raspberry Pi 4 和更新的旗舰系列设备以及 Compute Module 4 和 4S 之后的 Compute Module 设备默认支持 USB 启动。
早期版本的 Raspberry Pi 4 可能需要 bootloader 更新才能从 USB 启动。
早期版本的 Compute Module 4 可能需要 bootloader 更新 才能从 USB 启动。
树莓派3B+、Zero 2 W
树莓派3B+和Zero 2 W支持开箱即用的USB大容量存储启动功能。
树莓派Zero 2 W不支持网络启动。
树莓派2B、3A+、3B、CM3、CM3+
在树莓派 2B v1.2 和 v1.3、3A+、3B 以及计算模块 3 和 3+ 上,必须先启用 USB 主机启动模式。这将启用 USB 大容量存储启动和 网络启动 功能。
树莓派 3A+ 不支持网络启动。
��要在这些设备上启用 USB 主机启动模式,请在 OTP(一次性可编程)内存中设置 USB 主机位。要设置该位,请从 SD 卡启动,其中 /boot/firmware/config.txt 包含 program_usb_boot_mode=1 行。设置该位后,无需 SD 卡即可从 USB 启动。
使用 OTP 启用 USB 主机启动模式
您对 OTP(一次性可编程)存储器所做的任何更改都是永久性的,无法撤销。
在 Raspberry Pi 3A+ 上,将 OTP 位设置为启用 USB 主机启动模式将永久阻止 Raspberry Pi 以 USB 设备模式启动。
使用任何已刷新 Raspberry Pi OS 的 SD 卡来编程 OTP 位。
要启用 USB 主机启动模式,请在 config.txt 中添加以下一行:
program_usb_boot_mode=1
然后,使用 sudo reboot 重启 Raspberry Pi。要检查 OTP 编程是否正确,请运行以下命令:
vcgencmd otp_dump | grep 17:
17:3020000a
如果输出读数为 0x3020000a,则 OTP 已成功编程。如果输出结果不同,请再试一次编程过程。确保 config.txt 结尾没有空行。
现在,你可以从 USB 大容量存储设备启动,与从 SD 卡启动的方式相同--更多信息请参阅下一节。
从USB大容量存储设备启动
操作步骤与 SD 卡相同 - 向 USB 存储设备刷入操作系统。
准备好存储设备后,将硬盘连接到树莓派并启动它,注意外置硬盘需要额外的 USB 电源。
五到十秒钟后,树莓派应开始启动,并在连接的显示屏上显示彩虹闪屏。确保树莓派中没有插入 SD 卡,因为如果插入了 SD 卡,它将首先从 SD 卡启动。
有关启动顺序和其他启动模式(网络、USB 设备、GPIO 或 SD 启动),请参阅 启动模式文档。
已知的问题
- 检查可启动 USB 设备的默认超时为 2 秒。有些闪存盘和硬盘启动太慢。可以将超时延长至 5 秒(在 SD 卡中添加名为
timeout的新文件),但要注意有些设备需要更长的时间才能响应。 - 某些闪存盘有非常特殊的协议要求,启动代码无法处理,因此可能不兼容。
特殊的bootcode.bin-only启动模式
在 Raspberry Pi 2B v1.2、3A+、3B 和 3B+ 上,如果您无法使用特定的 USB 设备启动 Raspberry Pi,您可以改用 bootcode.bin-only 启动模式。Raspberry Pi 仍会从 SD 卡启动,但只会从 SD 卡读取 bootcode.bin;操作系统的其余部分则保存在 USB 设备上。
硬件兼容性
在从 USB 大容量存储设备启动之前,请验证该设备是否能在 Linux 下正常工作。使用 SD 卡启动并插入 USB 大容量存储设备。该设备应显示为可移动硬盘。这对 USB SATA 适配器尤为重要,在大容量存储模式下,bootloader 可能会支持 USB SATA 适配器,但如果 Linux 选择 USB 附加 SCSI-UAS 模式,USB SATA 适配器就会失效。
硬盘驱动器(HDD)通常需要一个供电的 USB 集线器。即使看起来一切正常,如果没有供电的 USB 集线器,也可能会遇到间歇性故障。
多个可启动驱动器
在搜索可启动分区时,引导程序会并行扫描所有 USB 大容量存储设备,并选择最先响应的设备。如果引导分区不包含合适的 start.elf 文件,引导程序会尝试下一个可用设备。没有根据 USB 拓扑指定启动设备的方法;这会减慢启动速度并增加不必要的配置复杂性。
使用 config.txt 文件 条件筛选器 在复杂的设备配置中选择备用固件。
网络启动
本节介绍网络启动在 Raspberry Pi 3B、3B+ 和 2B v1.2 上的工作原理。
在 Pi 4 和 Pi 5 上,网络启动是通过 EEPROM 中的第二阶段引导加载程序实现的。更多信息,请参阅 树莓派 bootloader 配置。
我们还有一个 关于设置网络启动系统的教程。
网络启动仅适用于上述型号的 Raspberry Pi 内置的有线适配器。不支持通过无线局域网启动,也不支持从任何其他有线网络设备启动。
网络启动时,启动 ROM 会执行以下操作:
- 初始化板载以太网设备(Microchip LAN9500 或 LAN7500)
- 发送 DHCP 请求(供应商类别标识符 DHCP 选项 60 设置为
PXEClient:Arch:00000:UNDI:002001) - 接收 DHCP 回复
- (可选)接收 DHCP 代理回复
- ARP 至 tftpboot 服务器
- ARP 回应包括 tftpboot 服务器的以太网地址
- TFTP RRQ(读请求)
bootcode.bin- 未找到文件: 服务器回复带有文本错误信息的 TFTP 错误回复
- 文件存在: 服务器将回复文件的第一个数据块(512 字节)��,并在标题中注明数据块编号
- 树莓派回复包含数据块编号的 TFTP ACK 数据包,并重复直到最后一个数据块不是 512 字节为止
- TFTP RRQ(读请求)
bootsig.bin- 这通常会导致
找不到文件的错误。这是意料之中的,TFTP 启动服务器应该可以处理。
- 这通常会导致
此时,bootcode.bin 代码将继续加载系统。它将尝试访问的第一个文件是 <serial_number>/start.elf。如果这没有导致错误,那么要读取的任何其他文件都将以 serial_number 作为前缀。这样做很有用,因为它可以为树莓派创建带有单独 start.elf / 内核的单独目录。
要获取设备的序列号,你可以尝试这种启动模式,并使用 tcpdump / wireshark 查看访问的文件,或者运行标准的树莓派OS SD卡并cat /proc/cpuinfo。
如果把所有文件都放在 TFTP 目录的根目录下,那么下面的所有文件都将从这里访问。
调试网络启动模式
首先要检查 OTP 位是否正确编程。为此,需要在 config.txt 中添加 program_usb_boot_mode=1,然后重新启动(使用能正确启动树莓派OS的标准 SD 卡)。完成这些操作后,您就可以进行以下操作:
vcgencmd otp_dump | grep 17:
如果第 17 行包含 3020000a,则 OTP 已正确编程。现在,您应该可以取出 SD 卡,插入以太网,然后在树莓派开机约 5 秒后,以太网 LED 灯应该会亮起。
要捕获服务器上的以太网数据包,请在 tftpboot 服务器(或 DHCP 服务器,如果两者不同)上使用 tcpdump。您需要捕获那里的数据包,否则将无法看到直接发送的数据包,因为网络交换机不是集线器!
sudo tcpdump -i eth0 -w dump.pcap
这将把所有来自 eth0 的数据写入名为 dump.pcap 的文件 ,然后您可以对其进行后处理或上传到 cloudshark.org 进行分析。
DHCP 请求/回复
您至少应该看到如下的 DHCP 请求和回复:
6:44:38.717115 IP (tos 0x0, ttl 128, id 0, offset 0, flags [none], proto UDP (17), length 348)
0.0.0.0.68 > 255.255.255.255.67: [no cksum] BOOTP/DHCP, Request from b8:27:eb:28:f6:6d, length 320, xid 0x26f30339, Flags [none] (0x0000)
Client-Ethernet-Address b8:27:eb:28:f6:6d
Vendor-rfc1048 Extensions
Magic Cookie 0x63825363
DHCP-Message Option 53, length 1: Discover
Parameter-Request Option 55, length 12:
Vendor-Option, Vendor-Class, BF, Option 128
Option 129, Option 130, Option 131, Option 132
Option 133, Option 134, Option 135, TFTP
ARCH Option 93, length 2: 0
NDI Option 94, length 3: 1.2.1
GUID Option 97, length 17: 0.68.68.68.68.68.68.68.68.68.68.68.68.68.68.68.68
Vendor-Class Option 60, length 32: "PXEClient:Arch:00000:UNDI:002001"
END Option 255, length 0
16:44:41.224619 IP (tos 0x0, ttl 64, id 57713, offset 0, flags [none], proto UDP (17), length 372)
192.168.1.1.67 > 192.168.1.139.68: [udp sum ok] BOOTP/DHCP, Reply, length 344, xid 0x26f30339, Flags [none] (0x0000)
Your-IP 192.168.1.139
Server-IP 192.168.1.1
Client-Ethernet-Address b8:27:eb:28:f6:6d
Vendor-rfc1048 Extensions
Magic Cookie 0x63825363
DHCP-Message Option 53, length 1: Offer
Server-ID Option 54, length 4: 192.168.1.1
Lease-Time Option 51, length 4: 43200
RN Option 58, length 4: 21600
RB Option 59, length 4: 37800
Subnet-Mask Option 1, length 4: 255.255.255.0
BR Option 28, length 4: 192.168.1.255
Vendor-Class Option 60, length 9: "PXEClient"
GUID Option 97, length 17: 0.68.68.68.68.68.68.68.68.68.68.68.68.68.68.68.68
Vendor-Option Option 43, length 32: 6.1.3.10.4.0.80.88.69.9.20.0.0.17.82.97.115.112.98.101.114.114.121.32.80.105.32.66.111.111.116.255
END Option 255, length 0
Vendor-Option Option 43 包含回复的重要部分。其中必须包含字符串 "Raspberry Pi Boot"。由于启动 ROM 中的一个错误,您可能需要在字符串末尾添加三个空格。
读取TFTP文件
如果正确指定了 Verdor 选项,您将看到随后发送的 TFTP RRQ 数据包。RRQ 的回复可能是第一个数据块,也可能是未找到文件的错误提示。在某些情况下,RRQ 甚至会收到第一个数据包,然后 Raspberry Pi 会中止传输(在检查文件是否存在时会出现这种情况)。下面的示例只有三个数据包:原始��读取请求、第一个数据块(总是 516 字节,包含一个报头和 512 字节的数据,但最后一个数据块总是小于 512 字节,长度可能为零)和第三个数据包(ACK,包含一个帧号,与数据块中的帧号一致)。
16:44:41.224964 IP (tos 0x0, ttl 128, id 0, offset 0, flags [none], proto UDP (17), length 49)
192.168.1.139.49152 > 192.168.1.1.69: [no cksum] 21 RRQ "bootcode.bin" octet
16:44:41.227223 IP (tos 0x0, ttl 64, id 57714, offset 0, flags [none], proto UDP (17), length 544)
192.168.1.1.55985 > 192.168.1.139.49152: [udp sum ok] UDP, length 516
16:44:41.227418 IP (tos 0x0, ttl 128, id 0, offset 0, flags [none], proto UDP (17), length 32)
192.168.1.139.49152 > 192.168.1.1.55985: [no cksum] UDP, length 4
已知问题
以太网启动模式存在一些已知的问题。由于启动模式的实现是在芯片本身,因此除了使用仅有 bootcode.bin 文件的 SD 卡外,没有其他变通办法。
DHCP请求五次后超时
树莓派会尝试五次 DHCP 请求,每次间隔五秒,总共 25 秒。如果服务器在这段时间内没有响应,树莓派就会进入低功耗状态。除了在 SD 卡上安装 bootcode.bin 之外,没有其他解决方法。
不支持独立子网上的 TFTP 服务器
已在树莓派3B+ (BCM2837B0) 中修复。
DHCP中继损坏
DHCP 检查还会检查跳数是否为 1,而 DHCP 中继时不会是 1。
已在树莓派3B+中修复。
Raspberry Pi启动字符串
由于字符串长度计算错误,DHCP 回复中的 "Raspberry Pi Boot "字符串需要额外的三个空格。
已在树莓派3B+中修复
DHCP UUID常量
DHCP UUID 被设置为常量。
在树莓派3B+中得到修复;该值被设置为 32 位序列号。
ARP检查可能在TFTP交互过程中无法响应
树莓派只有在初始化阶段才会响应 ARP 请求;一旦开始传输数据,它将无法继续响应。
已在树莓派3B+中修复。
未正确执行DHCP请求/回复/确认顺序
启动时,树莓派会广播一个 DHCPDISCOVER 数据包。DHCP 服务器回复一个 DHCPOFFER 数据包。然后,树莓派继续启动,而不进行 DHCPREQUEST 或等待 DHCPACK。这可能会导致两个不同的设备获得相同的 IP 地址,并在未正确分配给客户端的情况下使用该地址。
在这种情况下,不同的 DHCP 服务器会有不同的行为。dnsmasq(取决于设置)会对 MAC 地址进行散列以确定 IP 地址,并 ping 该 IP 地址以确保它未被使用。这样可以降低发生这种情况的几率,除非在散列后发生了碰撞。
GPIO启动模式
GPIO 启动模式仅适用于树莓派3A+、3B、3B+、CM3和3+。
可以对早期的 Raspberry Pi 进行配置,以便在开机时使用连接到 GPIO 连接器的硬件选择启动模式。这是通过在 SoC 的 OTP 存储器中设置位来实现的。一旦设置了这些位,它们就会永久分配五个 GPIO,以便进行选择。OTP 位一旦设置,就无法取消设置。由于这五个 GPIO 线路将始终控制启动,因此在启用时应慎重考虑。虽然您可以在 Raspberry Pi 启动后将 GPIO 用于其他功能,但您必须对它们进行设置,以便在 Raspberry Pi 启动时启用所需的启动模式。
要启用 GPIO 启动模式,请在 config.txt 文件中添加以下一行:
program_gpio_bootmode=n
其中 n 是您希望使用的 GPIO 组。然后重启一次树莓派,用此设置对 OTP 进行编程。第 1 组是 GPIO 22-26,第 2 组是 GPIO 39-43。除非您有一个CM模块,否则必须使用 组1(组 2 中的 GPIO 仅在CM上可用)。由于 OTP 位的排列方式,如果首先为 组1 的 GPIO 启动模式编程,那么稍后就可以选择 组2。反之则不行:一旦为 GPIO 启动模式选择了 组2,就不能再选择 组1。
一旦启用 GPIO 启动模式,树莓派将不再启动。您必须上拉至少一个启动模式 GPIO 引脚,树莓派才能启动。
引脚分配
树莓派3B 和 CM3
| 组1 | 组2 | 引导类型 |
|---|---|---|
| 22 | 39 | SD0 |
| 23 | 40 | SD1 |
| 24 | 41 | NAND(目前Linux不支持) |
| 25 | 42 | SPI(目前Linux不支持) |
| 26 | 43 | USB |
上表中的 USB 可选择 USB 设备启动模式和 USB 主机启动模式。要使用 USB 启动模式,必须在 OTP 存储器中启用该模式。更多信息,请参阅 USB设备启动 和 [USB主机启动](#usb主机启动模式。
树莓派3B后期版本(带金属盖的 BCM2837B0)、树莓派3A+、3B+ 和CM3+
| 组1 | 组2 | 引导类型 |
|---|---|---|
| 20 | 37 | SD0 |
| 21 | 38 | SD1 |
| 22 | 39 | NAND(目前Linux不支持) |
| 23 | 40 | SPI(目前Linux不支持) |
| 24 | 41 | USB设备 |
| 25 | 42 | USB 主机 - 大容量存储设备 |
| 26 | 43 | USB 主机 - 以太网 |
按照 GPIO 线路的数字顺序尝试各种启动模式,即 SD0,然后是 SD1,然后是 NAND 等等。
启动流程
SD0 是 Broadcom SD 卡/MMC 接口。SoC 内的启动 ROM 运行时,总是将 SD0 连接到内置 microSD 卡插��槽。在带有 eMMC 设备的计算模块上,SD0 与 eMMC 设备相连;在计算模块 Lite 上,SD0 位于边缘连接器上,与 CMIO 载板上的 microSD 卡插槽相连。SD1 是 Arasan SD 卡/MMC 接口,也能使用 SDIO。所有内置无线局域网的树莓派型号都使用 SD1 通过 SDIO 连接到无线芯片。
如 BCM2835 Arm外围设备数据表第 102 页所述,GPIO 线路的默认上拉电阻为 50KΩ。建议使用 5KΩ 的上拉电阻来上拉 GPIO 线路:这将允许 GPIO 正常工作,但不会消耗过多的功率。
NVMe SSD 启动
NVMe(非易失性内存高速接口)是一种通过PCIe总线访问外部存储的标准。您可通过 Compute Module 4 I/O板的PCIe插槽、Compute Module 5 I/O板的 M.2插槽,或使用M.2 HAT+/M.2 HAT+ Compact扩展板连接树莓派5来连接NVMe驱动器。经过额外配置后,您可从NVMe驱动器启动系统。
先决条件
硬件
- NVMe M.2 固态硬盘
- 将 PCIe 转换为 M.2 标准的适配器。
- 对于 Raspberry Pi 5,我们推荐使用 M.2 HAT+ 或 M.2 HAT+ Compact,它可将 Raspberry Pi 的 PCIe FFC 插槽转换为 M Key 接口。
- 对于 CM4,请搜索 "PCI-E 3.0 ×1 lane to M.2 NGFF M-Key SSD NVMe PCI Express 适配器卡"。
要检查 NVMe 驱动器是否连接正确,请从另一个存储设备(如 SD 卡)启动 Raspberry Pi 并运行 ls -l /dev/nvme*。输出示例如下。
crw------- 1 root root 245, 0 Mar 9 14:58 /dev/nvme0
brw-rw---- 1 root disk 259, 0 Mar 9 14:58 /dev/nvme0n1
软件
首先,确保 Raspberry Pi 运行最新的软件。运行以下命令进行更新:
sudo apt update && sudo apt full-upgrade
编辑 bootloader 启动顺序
使用 Raspberry Pi 软件配置工具更新引导加载程序:
sudo raspi-config
在 Advanced Options>Bootloader Order 下,指定一个包含 NVMe 的选项。 然后,它会将这些更改写入引导加载程序,并返回配置工具,你可以在其中 Finish 并重新启动。 现在,您的 Raspberry Pi 将使用新的启动顺序。
对于 CM4,使用 rpiboot 更新引导加载程序。你可以在 USB boot GitHub 存储库 中找到构建 rpiboot 和配置 IO 板以将 ROM 切换到 usbboot 模式的说明。
对于带有 eMMC 的 CM4 版本,请确保在启动顺序中将 NVMe 设为第一位。记住在 recovery/boot.conf 中的 BOOT_ORDER 中添加 NVMe 启动模式 6。
当 SD 卡插槽为空时,CM4 Lite 会自动从 NVMe 启动。
NVMe BOOT_ORDER
EEPROM 配置中的 BOOT_ORDER 设置控制启动行为。
对于 NVMe 启动,请使用启动模式 6。更多信息,请参阅 Raspberry Pi bootloader配置。
示例
下面是引导加载程序检测到 NVMe 驱动器时 UART 输出的示例:
Boot mode: SD (01) order f64
Boot mode: USB-MSD (04) order f6
Boot mode: NVME (06) order f
VID 0x144d MN Samsung SSD 970 EVO Plus 250GB
NVME on
然后它会找到一个 FAT 分区并加载 start4.elf:
Read start4.elf bytes 2937840 hnd 0x00050287 hash ''
然后它将加载内核并启动操作系统:
MESS:00:00:07.096119:0: brfs: File read: /mfs/sd/kernel8.img
MESS:00:00:07.098682:0: Loading 'kernel8.img' to 0x80000 size 0x1441a00
MESS:00:00:07.146055:0:[ 0.000000] Booting Linux on physical CPU 0x0000000000 [0x410fd083]
在 Linux 中,SSD 显示为 /dev/nvme0,"命名空间" 为 /dev/nvme0n1。将有两个分区/dev/nvme0n1p1(FAT)和/dev/nvme0n1p2(EXT4)。使用 lsblkå 检查分区分配:
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT
nvme0n1 259:0 0 232.9G 0 disk
├─nvme0n1p1 259:1 0 256M 0 part /boot/firmware
└─nvme0n1p2 259:2 0 232.6G 0 part /
故障排除
如果启动过程失败,请在 rpi-eeprom Github 代码库中提交问题,请确认包含了控制台和启动过程中屏幕上显示的任何内容。
HTTP启动
网络安装功能通过以太网使用 HTTP 引导树莓派进入嵌入式树莓派Imager。
除网络安装外,您还可以使用启动模式 7 通过 HTTP 下载的文件显式启动设备。即使禁用了启动时的网络安装,您仍然可以使用它。
例如,您可以将其添加到 BOOT_ORDER 中作为后备启动方法,或者将其放在 GPIO 条件后面,以便在 GPIO 引脚被拉低时从自己的服务器启动 HTTP 启动。
例如,如果将以下内容添加到 EEPROM 配置中,并将 GPIO 8(默认状态为 1 或高电平)拉低,就会下载文件 http://downloads.raspberrypi.org:80/net_install/boot.img 和 http://downloads.raspberrypi.org:80/net_install/boot.sig。如果启动时启用网络安装,将使用这两个URL。如果不将 GPIO 8 设为低电平,行为将保持不变。
[gpio8=0]
BOOT_ORDER=0xf7
HTTP_HOST=downloads.raspberrypi.org
NET_INSTALL_ENABLED=0
boot.img 和 boot.sig 签名文件是包含启动文件系统的内存盘。详情请参阅 boot_ramdisk。
如果启用了安全启动且未设置 HTTP_HOST,BOOT_ORDER 中的 HTTP 将被忽略。
要求
要使用 HTTP 启动,更新 到 2022 年 3 月 10 日或以后发布的引导加载程序。HTTP 启动需要有线以太网连接。
要使用自定义 CA 证书,请 update 至 2024 年 4 月 5 日或更高版本发布的引导加载程序。只有运行 BCM2712 CPU 的设备才支持自定义 CA 证书。
按键
所有 HTTP 下载都必须签名。bootloader包含一个用于默认主机 fw-download-alias1.raspberrypi.com 上文件的公钥。除非设置 HTTP_HOST,并在 EEPROM 中包含公钥,否则该密钥将用于验证网络安装映像。这允许你在自己的服务器上托管树莓派网络安装映像。
使用自己的网络安装映像需要对映像进行签名,并将自己的公开密钥添加到 EEPROM 中。目前,如果你应用公共 EEPROM 更新,你的密钥就会丢失,需要重新添加。
USBBOOT 提供编程公钥所需的所�有工具。
使用以下命令将公钥添加到 EEPROM 中。boot.conf 包含你的修改:
rpi-eeprom-config -c boot.conf -p mypubkey.pem -o pieeprom.upd pieeprom.original.bin
使用以下命令为 EEPROM 生成签名:
rpi-eeprom-digest -i pieeprom.upd -o pieeprom.sig
然后,使用以下命令用私钥签署网络安装映像:
rpi-eeprom-digest -i boot.img -o boot.sig -k myprivkey.pem
最后,将 boot.img 和 boot.sig 放在网络服务器上,以使用自己签名的网络安装映像。
证书
为了安全起见,网络安装使用 HTTPS 从 Raspberry Pi 网站下载操作系统映像。该功能使用引导加载程序中包含的我们自己的 CA 根来验证主机。
您可以在设备 EEPROM 中添加自己的 CA 证书,以便从自己的网站安全下载镜像。使用 rpi-eeprom-config 工具的 --cacertder 选项添加 DER 编码证书。必须在 EEPROM 配置设置中放置证书的哈希值,以确保证书不会被修改。
运行以下命令生成 DER 编码证书:
openssl x509 -in your_ca_root_cert.pem -out cert.der -outform DER
然后,运行以下命令生成证书的 SHA-256 哈希值:
sha256sum cert.der
你应该会看到类似下面的输出:
701bd97f67b0f5483a9734e6e5cf72f9a123407b346088638f597878563193fc cert.der
接下来,更新 boot.conf,加入证书的哈希值:
sudo rpi-eeprom-config --edit
在 [gpio8=0] 部分配置以下设置,替换:
<your_website>替换为 你的网站,例如yourserver.org<path_to_files>用 操作系统映像的路径 表示,例如path/to/files。<hash>用你上面生成的哈希值,例如701bd97f67b0f5483a9734e6e5cf72f9a123407b346088638f597878563193fc。
[all]
BOOT_UART=1
POWER_OFF_ON_HALT=0
BOOT_ORDER=0xf461
[gpio8=0]
BOOT_ORDER=0xf7
NET_INSTALL_ENABLED=0
HTTP_HOST=<your_website>
HTTP_PATH=<path_to_files>
HTTP_CACERT_HASH=<hash>
指定 HTTP_CACERT_HASH 时,网络安装将通过 443 端口使用 HTTPS 下载映像。如果不指定哈希值,网络安装将通过 80 端口使用 HTTP 下载映像。
最后,使用以下命令将所有内容加载到 EEPROM 中:
rpi-eeprom-config -c boot.conf -p mypubkey.pem -o pieeprom.bin --cacertder cert.der pieeprom.original.bin
rpi-eeprom-digest -k myprivkey.pem -i pieeprom.bin -o pieeprom.sig
网络启动时,Raspberry Pi 应使用 HTTPS 而不是 HTTP。要查看网络启动为下载解析的完整 HTTPS URL,请查看启动输出:
Loading boot.img ...
HTTP: GET request for https://yourserver.org:443/path/to/files/boot.sig
HTTP: GET request for https://yourserver.org:443/path/to/files/boot.img
安全启动
如果启用了安全启动,那么树莓派只能运行由客户私钥签名的代码。因此,如果你想使用网络安装或 HTTP 启动模式进行安全启动,你必须用自己的密钥签署 boot.img 并生成 boot.sig,然后将这些文件存放在某个地方供下载。EEPROM 中的公钥将用于验证映像。
如果启用了安全启动且未设置 HTTP_HOST,则网络安装和 HTTP 启动将被禁用。
有关安全启动的更多信息,请参阅 USBBOOT。
启动流程
以下启动顺序仅适用于基于BCM2837和BCM2837B0的树莓派型号。在此之前的型号上,树莓派将尝试SD卡启动,然后是USB设备模式启动。有关树莓派4和树莓派5的启动顺序,请参阅EEPROM启动流程部分。
树莓派3上的USB启动默认值取决于使用的版本。有关在默认情况下未启用USB启动模式的信息,请参见本页。
当BCM2837启动时,它会使用两个不同的来源来决定启用哪些启动模式。首先,检查OTP(一次性可编程)内存块,查看启用了哪些启动模式。如果启用了 GPIO启动模式设置,则会测试相关的GPIO线路,以选择应尝试哪种启用了OTP的启动模式。请注意,GPIO启动模式只能用于选择OTP中已启用的启动模式。有关配置GPIO启动模式的详细信息,请参阅GPIO启动模式。GPIO启动模式默认为禁用。
接下来,引导ROM会检查每个引导源是否存在名为 bootcode.bin 的文件;如果成功,它将把代码加载到本地128K缓存中并跳转到该文件。整个启动模式过程如下:
- BCM2837启动
- 读取OTP以确定要启用的启动模式
- 如果启用了GPIO启动模式,使用GPIO启动模式来细化已启用启动模式的列表
- 如果启用:检查在GPIO 48-53上的主SD的
bootcode.bin- 成功 - 启动
- 失败 - 超时(五秒)
- 如果启用:检查辅助SD
- 成功 - 启动
- 失败 - 超时(五秒)
- 如果启用:检查NAND
- 如果启用:检查SPI
- 如果启用:检查USB
- 如果 OTG引脚 == 0
- 启用USB,等待有效的USB 2.0设备(两秒)
- 设备发现:
- 如果设备类型 == hub
- 对每个端口进行递归
- 如果设备类型 ==(大容量存储或LAN951x)
- 存储在设备列表中
- 如果设备类型 == hub
- 设备发现:
- 递归遍历每个MSD
- 如果bootcode.bin找到boot
- 递归遍历每个 LAN951x
- DHCP/TFTP启动
- 启用USB,等待有效的USB 2.0设备(两秒)
- 否则(设备模式启动)
- 启用设备模式并等待主机PC枚举
- 回复PC的VID:
0a5cPID:0x2763(树莓派1或树莓派2)或0x2764(树莓派3)
- 如果 OTG引脚 == 0
- 如果没有插入SD卡,SD启动模式需要5秒钟才能失效。为了减少这种情况并更快地回到USB模式,可以插入一张没有任何内容的SD卡,或者使用上述 GPIO启动模式OTP设置只启用USB。
- Arm外围设备数据表第102页定义了GPIO的默认值。如果启动时的值不等于默认上拉,则启用该启动模式。
- USB枚举是一种向集线器上的下游设备供电的方法,然后等待设备拉动D+和D-线,以显示它是USB 1还是USB 2。这可能需要一些时间:在某些设备上,硬盘驱动器旋转和启动枚举过程可能需要长达三秒的时间。因为这是检测硬件是否已连接的唯一方法,所以我们必须等待最短的时间(两秒)。如果设备在最长超时后仍未响应,可以使用
config.txt中的program_usb_boot_timeout=1将超时时间延长至 5 秒。 - MSD启动优先于以太网启动。
- 第一个分区不再需要是FAT分区,因为MSD启动将继续搜索第一个分区之外的FAT分区。
- 启动ROM现在还支持GUID分区,并已使用Mac、Windows和Linux对硬盘驱动器进行了分区测试。
- LAN951x使用供应商ID 0x0424和产品ID
0xec00进行检测:这与独立LAN9500设备不同,后者的产品ID为0x9500或0x9e00。要使用独立LAN9500,需要添加I2C EEPROM以更改这些ID,使其与LAN951x匹配。
主SD卡启动模式按标准设置为GPIO 49-53。可以在第二组引脚上从辅助SD卡启动,即在GPIO引脚上添加辅助SD卡。不过,我们尚未启用这一功能。
NAND启动和SPI启动模式虽然还不能完全支持GPU,但也能正常工作。
USB设备启动模式在生��产时默认启用,但USB主机启动模式只有在 program_usb_boot_mode=1 时才能启用。一旦启用,处理器将使用处理器上OTGID 引脚的值来决定这两种模式。在任何树莓派B/B+上,OTGID引脚都被驱动为 "0",因此一旦启用,将只能通过主机模式启动(由于LAN951x设备的阻碍,无法通过设备模式启动)。
如果OTGID引脚处于浮动状态(例如插入PC),USB将在树莓派Zero或CM上作为USB设备启动,因此您可以将 bootcode.bin 放置到设备。在Github上可以找到相关的usbboot代码。
EEPROM启动流程
自 Raspberry Pi 4 起,Raspberry Pi 旗舰设备使用 EEPROM 引导加载程序。
该产品与之前产品的主要区别在于,第二阶段bootloader是从SPI闪存EEPROM加载的,而不是之前产品上的 bootcode.bin 文件。
第一阶段Bootloader
ROM(第一阶段)的引导流程如下:
- SoC上电
- 读取OTP以确定
nRPIBOOTGPIO是否已配置 - 如果
nRPIBOOTGPIO为高电平或OTP未定义nRPIBOOTGPIO- 检查OTP是否可以从 SD/EMMC加载
recovery.bin- 如果启用了SD recovery.bin,则检查主SD/EMMC
recovery.bin- 成功 - 运行
recovery.bin并更新SPI EEPROM - 失败 - 继续
- 成功 - 运行
- 如果启用了SD recovery.bin,则检查主SD/EMMC
- 检查第二阶段加载器的SPI EEPROM
- 成功 - 运行第二阶段bootloader
- 失败 - 继续
- 检查OTP是否可以从 SD/EMMC加载
- 循环
- 尝试从USB设备启动加载
recovery.bin- 成功 - 运行
recovery.bin并更新SPI EEPROM或切换到USB大容量存储设备模式 - 失败 - 重试USB设备启动
- 成功 - 运行
- 尝试从USB设备启动加载
recovery.bin是一个最小的第二阶段程序,用于刷新bootloader SPI EEPROM映像。
第二阶段Bootloader
本节介绍第二阶段bootloader的高级流程。
有关每种启动模式的更多信息,请参阅bootloader配置;有�关本阶段加载的 GPU 固件文件的说明,请参阅启动文件夹页面。
- 初始化时钟和SDRAM
- 读取EEPROM配置文件
- 检查
PM_RSTS寄存器以确定是否请求HALT- 检查
POWER_OFF_ON_HALT和EEPROMWAKE_ON_GPIO的配置设置。 - 如果
POWER_OFF_ON_HALT是1并且WAKE_ON_GPIO是0那么- 使用PMIC关闭系统电源
- 否则如果
WAKE_ON_GPIO是1- 如果GPIO3被拉低,则启用GPIO3上的下降沿中断以唤醒
- 睡觉
- 检查
- 循环
- 从EEPROM配置文件中的
BOOT_ORDER参数读取下一个启动模式。 - 如果 启动模式 ==
RESTART- 跳回到现场的第一个启动
BOOT_ORDER模式
- 跳回到现场的第一个启动
- 否则如果 启动模式 ==
STOP- 显示start.elf not found错误模式并永远等待。
- 否则如果 启动模式==SD CARD
- 尝试从SD卡加载固件
- 成功 - 运行固件
- 失败 - 继续
- 尝试从SD卡加载固件
- 否则如果 启动模式 ==
NETWORK那么- 使用DHCP协议获取IP地址
- 从DHCP或静态定义的TFTP服务器加载固件
- 如果未找到固件或发生超时或网络错误,则继续
- 否则如果 启动模式 ==
USB-MSD或 启动模式 ==BCM-USB-MSD那么- 当USB发现尚未超时
- 检查USB大容量存储设备
- 如果找到新的大容量存储设备,则
- 遍历每个驱动器 (LUN)
- 尝试加载固件
- 成功 - 运行固件
- 失败 - 前进到下一个 LUN
- 尝试加载固件
- 遍历每个驱动器 (LUN)
- 当USB发现尚未超时
- 否则如果 启动模式 ==
NVME那么- 扫描PCIe中的NVMe设备,如果找到
- 尝试从NVMe设备加载固件
- 成功 - 运行固件
- 失败 - 继续
- 尝试从NVMe设备加载固件
- 扫描PCIe中的NVMe设备,如果找到
- 否则如果 启动模式 ==
RPIBOOT那么- 尝试使用USB设备模式从USB OTG端口加载固件 - 请参阅usbboot。
RPIBOOT模式没有超时设置。
- 尝试使用USB设备模式从USB OTG端口加载固件 - 请参阅usbboot。
- 从EEPROM配置文件中的
如果发现pieeprom.upd文件,也可在固件启动前更新引导加载程序。有关引导加载程序更新的更多信息,请参阅bootloader EEPROM页面
树莓派5上的差异
- 电源按钮用于从PMIC
STANDBY或HALT唤醒,而不是GPIO 3 - 加载Linux内核而不是加载
start.elf固件。实际上,bootloader有一个嵌入式版本start.elf - 连接到 3A 电源时,USB 启动默认为禁用。在
/boot/firmware/config.txt中设置usb_max_current_enable=1可启用 USB 启动。或者也可以在 USB 启动失败时单次按下电源按钮,临时启用usb_max_current_enable并继续启动。不过,如果通过按下电源按钮启用,重启后该设置将不会继续存在。
故障安全操作系统更新 (tryboot)
bootloader/固件提供了一个一次性标记,如果设置了该标记,则会被清除,但会加载tryboot.txt而不是config.txt。该备用配置将指定待更新的操作系统固件、cmdline、内核和os_prefix参数。由于该标记会在启动固件前被清除,因此当机或重启时,将在下次重启时加载原始config.txt文件。
要设置 tryboot 标志,请在 reboot 命令中的分区号后添加 tryboot 。通常,分区号默认为零,但如果添加了额外参数,则必须指定分区号。向 reboot 传递参数时一定要使用引号:它只接受一个参数:
sudo reboot '0 tryboot'
所有型号的树莓派都支持tryboot,但是在树莓派4B 1.0和1.1版本中,EEPROM不得进行写保护。这是因为较旧的树莓派4B设备必须重置电源(失去 tryboot 状态),因此将其存储在EEPROM中。
如果启用了secure-boot,那么tryboot模式将加载tryboot.img而不是boot.img。
tryboot_a_b 模式
如果将autoboot.txt中的 tryboot_a_b 属性设置为 1,则将加载 config.txt,而不是 tryboot.txt。这是因为 tryboot 开关已在更高一级(分区级)完成,因此没有必要在备用分区内设置 tryboot.txt 文件。
从 boot.img ramdisk中加载文件时,tryboot_a_b 属性被隐式设置为 1。
树莓派Bootloader配置
编辑配置
在编辑bootloader配置之前,请更新您的系统以获取最新版本的rpi-eeprom软件包。
查看当前EEPROM配置,运行以下命令:
rpi-eeprom-config
要编辑它并将更新应用到最新的EEPROM版本,运行以下命令:
sudo -E rpi-eeprom-config --edit
有EEPROM更新过程的更多信息,请参阅启动EEPROM页面。
配置属性
本节介绍bootloader中可用的所有配置项。语法与config.txt相同,但属性特定于bootloader。除EDID外,还支持条件过滤器。
BOOT_UART
如果为1则在GPIO 14和15上启用UART调试输出。将接收调试终端配置为115200bps、8数据位、无奇偶校验位、1停止位。
默认值:0
UART_BAUD
仅限 Raspberry Pi 5 之后的旗舰机型。
更改bootloader UART的波特率。
支持的值为9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600
默认值:115200
WAKE_ON_GPIO
如果为1,则sudo halt将以低功耗模式运行,直到GPIO3或GLOBAL_EN短路接地。
此设置不适用于树莓派 5 及更高版本、树莓派 Compute Module 5 及更高版本以及树莓派 500 及更高版本,因为 专用电源按钮 始终可用于从 HALT 或 STANDBY 唤醒。
默认值:1
POWER_OFF_ON_HALT
如果为1且WAKE_ON_GPIO=0则sudo halt将关闭所有PMIC输出。这是停止时可能的最低功率状态,但可能会对某些HAT造成问题,因为5V电压仍处于开启状态。GLOBAL_EN必须与地短路才能启动。
即使关闭处理器,树莓派 400 上的专用电源按钮也会工作。默认情况下启用此行为,但可以设置 WAKE_ON_GPIO=2 以使用外部 GPIO 电源按钮代替专用电源按钮。
在树莓派 5 及更高版本和树莓派 500 及更高版本上,这会将 PMIC 置于 STANDBY(待机)模式,关闭所有输出。无需设置 WAKE_ON_GPIO,按下 专用电源按钮 即可启动设备。
默认值:自 CM5 起,计算模块和键盘型号为 1;否则为 0。
WAIT_FOR_POWER_BUTTON
仅限 Raspberry Pi 5 之后的旗舰型号。
如果该属性和 POWER_OFF_ON_HALT 都设置为 1,那么引导加载程序将立即断电,并在电源移除后第一次启动时等待按下电源键。这意味着系统不会在断电后立即启动,而是等待按下电源按钮。
默认值:0
BOOT_ORDER
BOOT_ORDER 设置允许灵活配置不同启动模式的优先级。它表示为一个32位无符号整数,其中每个位代表一种启动模式。启动模式按从最低有效位到最高有效位的顺序尝试。
BOOT_ORDER字段
BOOT_ORDER 属性定义了不同启动模式的顺序。从右向左读取,最多可定义8个数。
| 值 | 模式 | 描述 |
|---|---|---|
| 0x0 | SD卡检测 | 尝试SD,然后等待卡检测以指示卡已更改 - 现在已弃用,因为 0xf (RESTART) 可用。 |
| 0x1 | SD卡 | SD卡(或CM4上的eMMC)。 |
| 0x2 | 网络 | 网络启动 - 请参阅网络启动服务器教程 |
| 0x3 | RPIBOOT | RPIBOOT - 请参阅usbboot |
| 0x4 | USB-MSD | USB大容量存储启动 - 请参阅USB大容量存储启动 |
| 0x5 | BCM-USB-MSD | USB2.0从USB C型插座启动(CM4:CM4IO板上的USB A型插座)。不适用于树莓派5。 |
| 0x6 | NVME | 仅限CM4和树莓派5:从连接到PCIe接口的NVMe SSD启动。有关更多详细信息,请参阅NVMe启动。 |
| 0x7 | HTTP | 通过以太网进行HTTP启动。有关更多详细信息,请参阅HTTP启动。 |
| 0xe | STOP | 停止并显示错误模式。需要重新上电才能退出此状态。 |
| 0xf | RESTART | 从BOOT_ORDER字段中的第一个启动模式重新启动,即循环 |
RPIBOOT 通常通过选择 CM4 或 CM5 IO 板上的 nRPIBOOT 跳线隐式启用。不过,在自定义 BOOT_ORDER 中设置它可用于开发或部署场景,例如通过使用 set_reboot_order。如果使用,务必将其设置为 BOOT_ORDER 中的最后一个选项,因为此启动模式不支持超时或重试。
BOOT_ORDER例子
| BOOT_ORDER | 描述 |
|---|---|
| 0xf41 | 首先尝试 SD,然后尝试 USB-MSD,然后重复(如果 BOOT_ORDER 为空,则默认) |
| 0xf14 | 首先尝试 USB,然后尝试 SD,然后重复 |
| 0xf21 | 首先尝试 SD,然后尝试 NETWORK,然后重复 |
| 0xf46 | 首先尝试NVMe,然后尝试 USB-MSD,然后重复 |
BOOT_WATCHDOG_TIMEOUT
若设置为非零值(单位为秒),则在引导程序中启用硬件看门狗定时器。若操作系统未能在指定时间内启动,看门狗将重置系统。
Arm CPU启动后,引导程序看门狗将立即自动取消。它在引导程序移交操作系统后不会监控操作系统。
此功能适用于无人值守或远程系统,可确保从启动失败(例如操作系统无法加载)中恢复。
默认值:0(禁用)
BOOT_WATCHDOG_PARTITION
当引导程序看门狗触发时,此属性指定重置后启动的分区编号。这允许自动切换至恢复分区或备用分区。
若未设置,引导程序将重试默认分区(0)。
可结合 表达式过滤器 使用,在看门狗触发特定分区重启时应用不同设置或选择不同启动流程。
有关如何使用高分区号检测看门狗触发,请参阅 PARTITION 属性说明。
默认值:0
MAX_RESTARTS
如果 RESTART (0xf) 启动模式出现的次数超过 MAX_RESTARTS,就会触发看门狗重置。一般情况下不建议使用这种方式,但对于测试或远程系统来说,需要完全重置以解决硬件或网络接口问题时,这种方式可能会很有用。
默认值:-1(无限)
REBOOT_ON_FATAL_ERROR
如果在启动过程中遇到致命错误��,引导加载程序将在活动 LED 上显示错误模式三次,然后执行硬复位。这可以缓解由电源、HAT 或主板温度引起的间歇性硬件问题。此设置仅适用于引导加载程序,操作系统启动后无效。
重置前显示三次错误模式可限制重启速率。如需更快重启,请使用 BOOT_WATCHDOG_TIMEOUT。
设置 REBOOT_ON_FATAL_ERROR=0 可禁用自动重启,改为无限期显示错误模式。
默认值:1
SD_BOOT_MAX_RETRIES
SD 启动失败后,在转到 BOOT_ORDER 定义的下一种启动模式前重试的次数。
-1表示无限次重试。
默认值:0
SD_OVERCURRENT_CHECK
仅适用于树莓派 4B、5、500 及 500+。
启动前,引导程序会检测 SD 卡电源开关的过流信号。若 SD 卡损坏导致短路,将产生过流信号并引发发热现象。
若检测到过流状态,引导程序将切断SD卡电源并等待五秒后重新检测。此错误将显示在诊断屏幕、UART串口及活动指示灯(1长闪+2短闪)上。
通过在引导程序配置中设置SD_OVERCURRENT_CHECK=0,可将过流检测从错误模式切换为非阻塞警告模式。
默认值:1
SD_QUIRKS
SD_QUIRKS 属性提供了一组选项,用于支持设备调用和解决互操作性问题。
这些标志以位字段的形式实现。未定义的位保留供将来使用,并应设置为零。
| 值 | 行为 |
|---|---|
| 0x1 | 禁用 SD 高速模式。卡时钟频率限制为 12.5 MHz |
默认值:0
NET_BOOT_MAX_RETRIES
网络启动失败后,在转到 BOOT_ORDER 定义的下一种启动模式前重试的次数。
-1表示无限次重试。
默认值:0
DHCP_TIMEOUT
当前迭代失败之前整个 DHCP 序列的超时(以毫秒为单位)。
最小:5000
默认值:45000
DHCP_REQ_TIMEOUT
重试 DHCP DISCOVER 或 DHCP REQ 之前的超时时间(以毫秒为单位)。
最小:500
默认值:4000
TFTP_FILE_TIMEOUT
通过 TFTP 下载单个文件的超时时间(以毫秒为单位)。
最小:5000
默认值:30000
TFTP_IP
可选的 TFTP 服务器的 IP 地址(如 192.168.1.99),它将覆盖 DHCP 请求中的服务器 IP 地址。
这在家庭网络中可能很有用,因为在宽带路由器作为 DHCP 服务器的情况下,可以用 tftpd-hpa 代替 dnsmasq。
默认值: ""
TFTP_PREFIX
为了支持每个 Raspberry Pi 独特的 TFTP 启动目录,引导加载程序会在文件名前加上设备特定目录的前缀。如果在前缀目录中既找不到 start4.elf 也找不到 start.elf,那么前缀就会被清除。
在早期型号上,序列号被用作前缀,但在 Raspberry Pi 4 和 5 上,MAC 地址不再由序列号生成,因此很难通过检查 DHCPDISCOVER 数据包在服务器上自动创建 tftpboot 目录。为了支持这一点,TFTP_PREFIX 可以自定义为 MAC 地址、固定值或序列号(默认值)。
| 值 | 描述 |
|---|---|
| 0 | 使用序列号,例如9ffefdef/ |
| 1 | 使用 TFTP_PREFIX_STR 指定的字符串 |
| 2 | 使用 MAC 地址,例如dc-a6-32-01-36-c2/ |
默认值:0
TFTP_PREFIX_STR
指定 TFTP_PREFIX 设置为 1 时使用的自定义目录前缀字符串。例如:TFTP_PREFIX_STR=tftp_test/
默认�值:""
最大长度:32 个字符
PXE_OPTION43
用不同的字符串覆盖 PXE Option43 匹配字符串。通常情况下,对 DHCP 服务器进行定制比改变客户端行为要好,但在无法做到这一点的情况下,我们提供了这个选项。
默认值:Raspberry Pi Boot
DHCP_OPTION97
在早期版本中,客户端 GUID(Option97)只是重复四次的序列号。默认情况下,新的 GUID 格式是四字符代码(FourCC)(Raspberry Pi 4 为 RPi4``0x34695052 或 Raspberry Pi 5 为 RPi5``0x35695052 )、电路板修订版(例如 0x00c03111 或 0x00d04170)(4 个字节)、MAC 地址的最小有效 4 个字节和 4 个字节序列号的连接。
这样做的目的是使其具有唯一性,同时也为 DHCP 服务器提供结构化信息,从而无需依赖以太网 MAC OUID 就能识别 Raspberry Pi 4 和 5 计算机。
指定 DHCP_OPTION97=0 以恢复旧的行为,或指定一个非零十六进制值以指定自定义的 4 字节前缀。
默认值:0x34695052
MAC_ADDRESS
用给定值覆盖树莓派以太网 MAC 地址,例如 dc:a6:32:01:36:c2
默认值: ""
MAC_ADDRESS_OTP
用存储在客制 OTP 寄存器中的值覆盖树莓派以太网 MAC 地址。
例如,使用存储在客制 OTP 第 0 行和第 1 行的 MAC 地址。
MAC_ADDRESS_OTP=0,1
第一个值(示例中的第 0 行)包含 OUI 和 MAC 地址最重要的 8 位。第二个值(示例中的第 1 行)存储 MAC 地址的其余 16 位。这与生产时编程的树莓派 MAC 地址格式相同。
可以选择任意两个行,并按任意顺序进行组合。
客制 OTP 行是 vcgencmd otp_dump 输出中的 OTP 寄存器 36 至 43,因此如果对前两行进行如下编程,那么 MAC_ADDRESS_OTP=0,1 将给出 `e4:5f:01:20:24:7e`` 的 MAC 地址。
36:247e0000 37:e45f0120 默认值:""
静态 IP 地址配置
如果设置了 TFTP_IP 和以下选项,则跳过 DHCP,应用静态 IP 配置。如果 TFTP 服务器与客户端位于同一子网,则可以省略 GATEWAY。
CLIENT_IP
客户端的IP�地址,例如192.168.0.32
默认值: ""
SUBNET
子网地址掩码,例如255.255.255.0
默认值: ""
GATEWAY
如果 TFTP 服务器位于不同的子网上,则使用的网关地址,例如192.168.0.1
默认值: ""
DISABLE_HDMI
如果 DISABLE_HDMI=1,HDMI 启动诊断 显示将被禁用。其他非零值保留供将来使用。
默认值:0
HDMI_DELAY
跳过 HDMI 诊断显示,最多 N 秒(默认 5 秒),除非发生致命错误。默认行为旨在避免在正常的 SD/USB 启动过程中短暂出现引导加载程序诊断屏幕。
默认值:5
ENABLE_SELF_UPDATE
启用bootloader从 TFTP 或 USB 大容量存储设备 (MSD) 启动文件系统进行自我更新。
如果启用了自我更新,bootloader将在引导文件系统中查找更新文件(.sig/.upd)。如果更新映像与当前映像不同,则应用更新并重置系统。否则,如果 EEPROM 映像完全相同,则引导继续正常进行。
注意事项:
- 2021 年之前的引导加载程序版本不支持
自更新。 - 在 2022 年之前,SD 启动不启用自更新。在树莓派4上,ROM 已经可以从 SD 卡加载 recovery.bin。在 CM4 上,自更新和 recovery.bin 都不起作用,需要 USB 启动(参见 CM4 引导加载程序文档)。
- 从 2022 年(测试版和稳定版)开始,SD 卡的自更新功能已启用。
- 对于网络启动,请确保 TFTP
boot目录可以通过 NFS 挂载,且rpi-eeprom-update可以写入该目录。
默认值:1
FREEZE_VERSION
以前,此属性仅由 rpi-eeprom-update 脚本检查。 但是,既然启用了自更新,bootloader也会检查此属性。 如果设置为 1,则会覆盖 ENABLE_SELF_UPDATE 以停止自动更新。 要禁用 FREEZE_VERSION,您必须使用带有 recovery.bin 的 SD 卡启动。
自定义 EEPROM 更新脚本还必须检查此标志。
默认值:0
HTTP_HOST
如果启动了网络安装或 HTTP 启动,则会从该服务器下载 boot.img 和 boot.sig。
无效的主机名将被忽略。如果设置了 HTTP_HOST,则会禁用 HTTPS,而使用普通 HTTP。可以指定一个 IP 地址,以避免 DNS 查找。主机名中不要包含 HTTP 前缀或任何正斜杠。
默认值:fw-download-alias1.raspberrypi.com
HTTP_PORT
您可以使用此属性更改用于网络安装和 HTTP 启动的端口。使用默认主机 fw-download-alias1.raspberrypi.com 时,HTTPS 将启用。如果更改了 HTTP_HOST,则会禁用 HTTPS,而使用普通 HTTP。
禁用 HTTPS 后,即使 HTTP_PORT 更改为 443,仍将使用普通 HTTP。
默认值:启用 HTTPS 时为 443,否则为 80
HTTP_PATH
用于网络安装和 HTTP 启动的路径。
路径的大小写很重要。路径分隔符使用正(Linux)斜线。前斜线和后斜线不是必需的。
如果未设置 HTTP_HOST,HTTP_PATH 将被忽略,URL 将是 https://fw-download-alias1.raspberrypi.com:443/net_install/boot.img。如果设置了 HTTP_HOST,URL 将是 http://<HTTP_HOST>:<HTTP_PORT>/<HTTP_PATH>/boot.img
默认��值:net_install
HTTP_CACERT_HASH
当 HTTP_HOST 设置为自定义服务器时,用于 HTTPS 网络安装和 HTTP 启动的 DER 编码 CA 证书的 SHA-256 哈希(十六进制字符串)。CA 证书本身通过 rpi-eeprom-config --cacertder 嵌入到 EEPROM 镜像中。
当 HTTP_CACERT_HASH 与 HTTP_HOST 和 HTTP_PATH 一起指定时,网络安装和 HTTP 启动将通过 443 端口使用 HTTPS,而非通过 80 端口使用明文 HTTP。
详见 HTTP 启动了解更多详情。
默认值:""(未设置)
IMAGER_REPO_URL
树莓派 Imager 应用程序通过启动时下载的JSON文件进行配置。默认情况下,树莓派映像程序使用位于 https://downloads.raspberrypi.com/os_list_imagingutility_v4.json 的JSON文件。
在EEPROM配置中设置IMAGER_REPO_URL,可指定在使用嵌入式树莓派映像程序进行网络安装时使用的JSON文件位置。
您也可通过以下任一方式修改应用程序使用的 JSON 文件 URL,使其提供您自定义的镜像:
- 启动 Imager 时传递
--repo参数,例如:rpi-imager --repo https://downloads.raspberrypi.com/os_list_imagingutility_v4.json - 在树莓派映像程序界面中:
- 进入 应用选项 �对话框
- 在 内容存储库 处选择 编辑
- 若使用本地计算机的JSON文件,请选择 使用自定义文件 并浏览至文件位置
- 若需使用URL托管的JSON文件,请选择 使用自定义URL 并输入URL。
- 点击应用并重启。Imager将重置设备及操作系统选项,并返回 设备 选项卡。
NET_INSTALL_ENABLED
启用网络安装后,如果检测到键盘,bootloader会在启动时显示网络安装屏幕。
要启用网络安装,请添加 NET_INSTALL_ENABLED=1;要禁用网络安装,请添加 NET_INSTALL_ENABLED=0。
如果设置了 DISABLE_HDMI=1,该设置将被忽略并禁用网络安装。
为了检测键盘,网络安装必须初始化 USB 控制器并枚举设备。这将增加约 1 秒钟的启动时间,因此在某些嵌入式应用中禁用网络安装可能更有优势。
默认值:自 Raspberry Pi 4B 和键盘型号起,旗舰型号上使用 1;自 CM4(包括 CM4S)起,计算模块上使用 0。
NET_INSTALL_AT_POWER_ON
设置为 1 时,在冷启动后短暂显示网络安装用户界面,以便新用户更清楚地了解该功能。如果设置冲突,则覆盖 NET_INSTALL_ENABLED。
默认引导加载程序映像在引�导加载程序配置中将此值设为 1。要禁用简短的网络安装用户界面显示,请使用 raspi-config 中的 Advanced Options 菜单或手动删除 rpi-eeprom-config 中的这一行:
sudo rpi-eeprom-config --edit
默认值:0
NET_INSTALL_KEYBOARD_WAIT
如果启用网络安装,bootloader会尝试检测键盘和 SHIFT 键以启动网络安装。您可以更改此属性等待的长度(以毫秒为单位)。
将其设置为 0 将禁用键盘等待,但如果未找到启动文件并且 BOOT_ORDER 设置为 USB启动模式 (4) ,仍然可以启动网络安装。
测试表明键盘和 SHIFT 检测至少需要 750 毫秒。
默认值:900
NETCONSOLE - 高级日志记录
NETCONSOLE 将调试信息复制到网络接口。IP 地址和端口由 NETCONSOLE 字符串定义。
NETCONSOLE 会阻塞,直到以太网链接建立或发生超时。超时值为 DHCP_TIMEOUT,但除非请求网络启动,否则不会尝试 DHCP。
格式
更多信息参见 Netconsole文档
src_port@src_ip/dev_name,dst_port@dst_ip/dst_mac
#例如 6665@169.254.1.1/,6666@/
为了简化解析,引导加载程序要求每个字段分隔符都必须存在。必须指定源 IP 地址,但以下字段可以留空并分配默认值。
src_port-6665dev_name- "" (设备名称始终被忽略)dst_port-6666dst_ip-255.255.255.255dst_mac- `00:00:00:00:00
查看数据的一种方法是将测试的 树莓派4 连接到另一个运行 WireShark 的 树莓派,选择 "udp.srcport == 6665 "作为过滤器,然后选择分析 -> 跟踪 -> UDP 流,以 ASCII 日志的形式查看。
默认情况下不应启用 NETCONSOLE,因为它可能会导致网络问题。可以通过 GPIO 过滤器按需启用,例如
# 如果GPIO7拉低,则启用调试
[gpio7=0]
NETCONSOLE=6665@169.254.1.1/,6666@/
默认值:""(未启用) 最大长度:32 个字符
PARTITION
如果重启命令(如 sudo reboot N)或 autoboot.txt 中的 boot_partition=N 未明确设置引导分区号,则可使用 PARTITION 选项指定引导分区号。如果用户按下按钮,该选项可用于从应急分区启动。
最新固件还允许覆盖高分区号(> 31)。这允许对系统硬件看门狗进行自定义设置,以特殊的高分区号(如 62)触发重启,引导加载程序可检测到该分区号(使用条件过滤器)并重新映射到恢复分区。
例如
# 系统看门狗已启动 - 使用附加选项启动救援分区
# 禁用 SD 高速模式并立即启用 HDMI 诊断。
[partition=62]
PARTITION=2
HDMI_DELAY=0
SD_QUIRKS=1
# 如果GPIO7拉低,则从分区2启动
[gpio7=0]
PARTITION=2
默认值:0
PARTITION_WALK
此属性旨在提高使用 autoboot.txt 的 A/B 启动方案的可靠性,方法是在指定分区似乎不可启动时搜索可启动分区。如果 PARTITION_WALK=1,且所请求的分区不可启动且没有有效的 autoboot.txt,那么引导加载程序将依次检查每个分区(最多 8 个),看其是否可启动(在 Pi4 上包含 start4.elf,或在 Pi 5 或更新版本上包含 config.txt 和合适的设备树)。
在分区遍历过程中,不会处理 autoboot.txt 文件,以避免循环依赖。假定请求的启动分区已失败,系统正在尝试恢复。
默认值:1
BOOTVAR0
允许设置由 config.txt 使用的条件变量 bootvar0。详见 bootvar0。
PCIE_PROBE
仅限 Raspberry Pi 5 及之后旗舰型号。
设置为 1 时,引导加载程序在启动过程中枚举 PCIe x1 接口以发现 NVMe 设备。对于不支持 HAT+ 规范的自定义 PCIe 扩展设计,需要此设置。符合 HAT+ 规范的设备会被自动检测,不需要此设置。
默认值:0
PSU_MAX_CURRENT
仅限树莓派5。
如果设置了该属性,固件将跳过 USB 供电协商,并假定已连接到额定电流的电源上。通常情况下,该值应设置为 3000 或 5000,即低电流或高电流电源。
默认值: ""
USB_MSD_EXCLUDE_VID_PID
最多 4 个 VID/PID 对的列表,指定引导加载程序应忽略的设备。如果与 HUB 匹配,则不会枚举 HUB,从而排除所有下游设备。这样做的目的是让有问题的设备(如枚举速度很慢)在引导枚举过程中被忽略。这是引导加载程序特有的,不会传递给操作系统。
格式是以逗号分隔的十六进制值列表,其中 VID 为最显著位。不允许有空格。例如:034700a0,a4231234
默认值: ""
USB_MSD_DISCOVER_TIMEOUT
如果在超时时间内没有找到 USB大容量存储设备,则 USB-MSD 停止,并选择下一种启动模式。
最小值:5000(5 秒)
默认值:20000(20 秒)
USB_MSD_LUN_TIMEOUT
在进入下一个 LUN(如多插槽 SD 卡读卡器)之前等待的时间(以毫秒为单位)。虽然还在调整中,但如果连接的是老式/慢速设备以及包含操作系统的快速 USB-MSD 设备,这可能有助于加快启动速度。
最小值:100
默认值:2000(2 秒)
USB_MSD_PWR_OFF_TIME
仅支持树莓派4.
当 Pi 重新启动电源时,硬件会关闭 USB 电源。较短的断电时间可能会导致某些 USB 设备出现问题,因此可以使用此参数强制较长时间的断电,就像电缆被物理移除一样。
在树莓派 4 1.3 版及更旧版本上,可配置/长时间断电要求启用 XHCI 控制器,因此实际上是先短时间断电,然后再长时间配置断电。可以通过将该参数设置为零来跳过较长的可配置断电时间。
在较新的版本中,硬件会确保 USB 电源在重启后关闭,引导加载程序仅在超时后才会启用电源。这是在内存初始化确保 USB 电源关闭至少两秒后发生的。因此,该参数通常对较新的硬件版本没有影响。
最小值:0
最大值:5000
默认值:1000(1 秒)
USB_MSD_STARTUP_DELAY
如果已定义,则在 USB 主机控制器初始化后,将 USB 枚举延迟给定的超时时间。如果 USB 硬盘驱动器需要很长时间才能初始化并触发 USB 超时,则可利用此延迟为驱动程序提供额外的初始化时间。可能还需要增加 USB 总超时(USB_MSD_DISCOVER_TIMEOUT)。
最小值:0
最大值:30000(30 秒)
默认值:0
VL805
仅限CM4。
如果 VL805 属性设置为 1,引导加载程序将搜索 VL805 PCIe XHCI 控制器,并尝试使用嵌入在引导加载程序 EEPROM 中的 VL805 固件对其进行初始化。这样,工业设计就可以使用 VL805 XHCI 控制器,而无需为 VL805 固件提供专用的 SPI EEPROM。
- 在CM4上,bootloader从不写入专用的 VL805 SPI EEPROM。该选项只是将控制器配置为从 SDRAM 加载固件。
- 如果 VL805 XHCI 控制器有专用 EEPROM,请勿使用该选项。它将无法初始化,因为 VL805 ROM 会尝试使用专用的 SPI EEPROM(如果已安装)。
- 嵌入式 VL805 固件假定 USB 配置与树莓派4B相同(2 个 USB 3.0 端口和 4 个 USB 2.0 端口)。该固件不支持加载其他 VL805 固件映像,此类配置应使用专用的 VL805 SPI EEPROM。
默认值:0
XHCI_DEBUG
该属性是一个位字段,用于控制大容量存储器启动模式下 USB 调试信息的冗长程度。启用所有这些信息会产生大量日志数据,从而减慢启动速度,甚至可能导致启动失败。要获得冗长日志,最好使用 NETCONSOLE。
| 值 | 日志内容 |
|---|---|
| 0x1 | USB描述符 |
| 0x2 | 大容量存储模式状态机 |
| 0x4 | 大容量存储模式状态机 – 详细 |
| 0x8 | 所有 USB 请求 |
| 0x10 | 设备和集线器状态机 |
| 0x20 | 所有 xHCI TRB(非常详细) |
| 0x40 | 所有 xHCI 事件(非常详细) |
要组合值,请将它们相加。例如:
# 启用 大容量存储 和 USB描述符 日志记录
XHCI_DEBUG=0x3
默认值:0x0(不启用 USB 调试消息)
SDRAM_BANKLOW
SDRAM_BANKLOW 控制系统地址空间内 SDRAM Bank 的排列方式。Bank 数量可选择映射至地址的高位(MSB),或位于行地址位与列地址位之间。 此设置将显著影响SDRAM性能。
未设置时,引导程序将选择默认选项。当前树莓派 4 系列默认值为 3,树莓派 5 系列默认值为 1。
| BANKLOW | 地址��位映射 |
|---|---|
| 0 | Address={bank[3:0], row, column} |
| 1 | Address={bank[3:1], row, bank[0], column} |
| 2 | Address={bank[3:2], row, bank[1:0], column} |
| 3 | Address={bank[3], row, bank[2:0], column} |
| 4 | Address={row, bank[3:0], column} |
此设置还会促使引导程序为内核添加NUMA区域数量配置项("numa=fake=<n>")。 为获得最佳性能,建议保留默认设置。
在树莓派5系列设备上,若内核不支持NUMA,性能将受到负面影响。
手动设置SDRAM_BANKLOW=3可缓解此性能损失,但追求最高性能时请确保NUMA可用。
默认值:未设置(使用引导程序推荐设置)
config.txt段
读取 config.txt 文件后,GPU 固件 start4.elf 会读取引导加载程序 EEPROM 配置,并检查是否存在名为 [config.txt] 的配置段。如果[config.txt]段存在,那么从该部分开始到文件结束的内容都会被添加到内存中,与从引导分区读取的 config.txt 文件内容相同。这可用于将设置自动应用到每个操作系统,例如 dtoverlays。
如果使用无效配置配置引导加载程序,导致引导失败,则必须重新刷新引导加载程序 EEPROM,使用有效配置引导。
显示并行接口 (DPI)
在树莓派上使用 DPI 显示器
显示并行接口 (DPI) 显示器可通过 40 针通用输入/输出 (GPIO) 连接器连接到树莓派设备,以替代专用的显示串行接口 (DSI) 或高清多媒体接口 (HDMI) 端口。
所有带有 40 路接头的树莓派电路板和计算模块都有一个高达 24 位的并行 RGB 接口。该接口允许以 RGB24(红绿蓝 8 位)或 RGB666(每种颜色 6 位)或 RGB565(红、绿、蓝各 5 位)将并行 RGB 显示器连接到树莓派 GPIO。
该接口由 GPU 固件控制,用户可通过特殊的 config.txt 参数和启用正确的 Linux 设备树覆盖对其进行编程。
GPIO 引脚
树莓派 GPIO 第 0 组可选择的备用功能之一是 DPI(显示并行接口),这是一个简单的时钟并行接口(最多 8 位 R、G 和 B;时钟、使能、hsync 和 vsync)。该接口可作为 GPIO 组 0 上的备用功能 2 (ALT2):(译注:下表不译,维持原状更适合专业人士阅读)
| GPIO | ALT2(备用功能2) |
|---|---|
| GPIO00 | PCLK |
| GPIO01 | DE |
| GPIO02 | LCD_VSYNC |
| GPIO03 | LCD_HSYNC |
| GPIO04 | DPI_D0 |
| GPIO05 | DPI_D1 |
| GPIO06 | DPI_D2 |
| GPIO07 | DPI_D3 |
| GPIO08 | DPI_D4 |
| GPIO09 | DPI_D5 |
| GPIO10 | DPI_D6 |
| GPIO11 | DPI_D7 |
| GPIO12 | DPI_D8 |
| GPIO13 | DPI_D9 |
| GPIO14 | DPI_D10 |
| GPIO15 | DPI_D11 |
| GPIO16 | DPI_D12 |
| GPIO17 | DPI_D13 |
| GPIO18 | DPI_D14 |
| GPIO19 | DPI_D15 |
| GPIO20 | DPI_D16 |
| GPIO21 | DPI_D17 |
| GPIO22 | DPI_D18 |
| GPIO23 | DPI_D19 |
| GPIO24 | DPI_D20 |
| GPIO25 | DPI_D21 |
| GPIO26 | DPI_D22 |
| GPIO27 | DPI_D23 |
在 565、666 或 24 位模式下,DPI 输出引脚上的颜色值有多种显示方式(请参阅下表和下面 dpi_output_format 参数的 output_format 部分):
| 模式 | RGB bits | GPIO | |||||||||||||||||||||||
| 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | ||
| 1 | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 2 | 565 | - | - | - | - | - | - | - | - | 7 | 6 | 5 | 4 | 3 | 7 | 6 | 5 | 4 | 3 | 2 | 7 | 6 | 5 | 4 | 3 |
| 3 | 565 | - | - | - | 7 | 6 | 5 | 4 | 3 | - | - | 7 | 6 | 5 | 4 | 3 | 2 | - | - | - | 7 | 6 | 5 | 4 | 3 |
| 4 | 565 | - | - | 7 | 6 | 5 | 4 | 3 | 2 | - | - | - | 7 | 6 | 5 | 4 | 3 | 2 | - | - | 7 | 6 | 5 | 4 | 3 |
| 5 | 666 | - | - | - | - | - | - | 7 | 6 | 5 | 4 | 3 | 2 | 7 | 6 | 5 | 4 | 3 | 2 | 7 | 6 | 5 | 4 | 3 | 2 |
| 6 | 666 | - | - | 7 | 6 | 5 | 4 | 3 | 2 | - | - | 7 | 6 | 5 | 4 | 3 | 2 | - | - | 7 | 6 | 5 | 4 | 3 | 2 |
| 7 | 888 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
禁用其他GPIO外设��
必须禁用使用与 GPIO 引脚冲突的所有其他外设覆盖。在 config.txt 中,小心地注释掉或反转任何启用 I2C 或 SPI 的 dtparams:
dtparam=i2c_arm=off
dtparam=spi=off
配置显示
只要有合适的驱动程序,内核模式设置(KMS)通用显示接口就能向任意显示器输出。
自动检测
自动检测允许树莓派与显示器连接,无需手动配置设备树覆盖。自动检测默认为启用。在 config.txt 中添加以下一行,即可启用显示器自动检测:
display_auto_detect=1
译注:这个示例可能有误,单引号是否需要待确认
将 1 替换为 0 以禁用自动检测。当你连接树莓派官方显示屏并启用自动检测时,KMS 会自动判断显示屏型号并配置相应的显示屏设置。
手动配置显示器
在树莓派OS Bookworm 或更高版本中,以前用于设置 DPI 的 config.txt 中的 dpi_output_format 和 dpi_timings 条目已被 vc4-kms-dpi-generic 覆盖所取代。
要使用树莓派官方显示屏以外的任何显示屏,必须在 config.txt 中指定一个 dtoverlay 项。面板制造商应在 Linux 内核代码中为你的显示器配置时序,并提供一个覆盖层来启用这些设置。有关示例,请参阅 Adafruit Kippah 显示器条目。下面的示例演示了如何在 /boot/firmware/config.txt 文件中为 Kippah 显示器设置 dtoverlay 条目:
dtoverlay=vc4-kms-kippah-7inch-overlay
显示时序通常在内核中定义,但也可以在提供的 panel-dpi 驱动程序中定义。如果内核代码中没有定义面板的覆盖层,可以使用 panel-dpi 驱动程序将显示时序定义为参数。这样就能为任何显示器手动配置设备树条目。
下面的示例演示了如何使用设备树参数定义定时:
dtoverlay=vc4-kms-v3d
dtoverlay=vc4-kms-dpi-generic,hactive=480,hfp=26,hsync=16,hbp=10
dtparam=vactive=640,vfp=25,vsync=10,vbp=16
dtparam=clock-frequency=32000000,rgb666-padhi
设备树行长度不得超过 80 个字符。如果某个设置需要的行长超过 80 个字符,请将该参数的分配分到多行中。
显示树定义参数支持以下选项:
| 选项 | 描述 |
|---|---|
clock-frequency | 显示时钟频率 (Hz) |
hactive | 水平有效像素 |
hfp | 水平前廊 |
hsync | 水平同步脉冲宽度 |
hbp | 水平后廊 |
vactive | 垂直活动线 |
vfp | 垂直前廊 |
vsync | 垂直同步脉冲宽度 |
vbp | 垂直后廊 |
hsync-invert | 水平同步低电平有效 |
vsync-invert | 垂直同步低电平有效 |
de-invert | 数据使能低电平有效 |
pixclk-invert | 下降沿像素时钟 |
width-mm | 定义屏幕宽度(以毫米为单位) |
height-mm | 定义屏幕高度(以毫米为单位) |
rgb565 | 更改为 GPIO 0-19 上的 RGB565 输出 |
rgb666-padhi | 更改为 GPIO 0-9、12-17 和 20-25 上的 RGB666 输出 |
rgb888 | 更改为 GPIO 0-27 上的 RGB888 输出 |
bus-format | 覆盖 MEDIA_BUS_FMT_* 值的总线格式,也由 rgbXXX 覆盖覆盖 |
backlight-gpio | 定义用于背光控制的GPIO(默认值:无) |
通用I/O (GPIO)
目前所有 Raspberry Pi 电路板上都有一个 40 针 GPIO(通用输入/输出)针座。所有板上的 GPIO 针座的针距都是 0.1 英寸(2.54 毫米)。
在没有 H 后缀的 Zero 和 Pico 设备上,该针座没有填充(没有针座)。
通用I/O (GPIO) 引脚可配置为通用输入、通用输出或多达六种特殊备用设置之一,其功能取决于引脚。
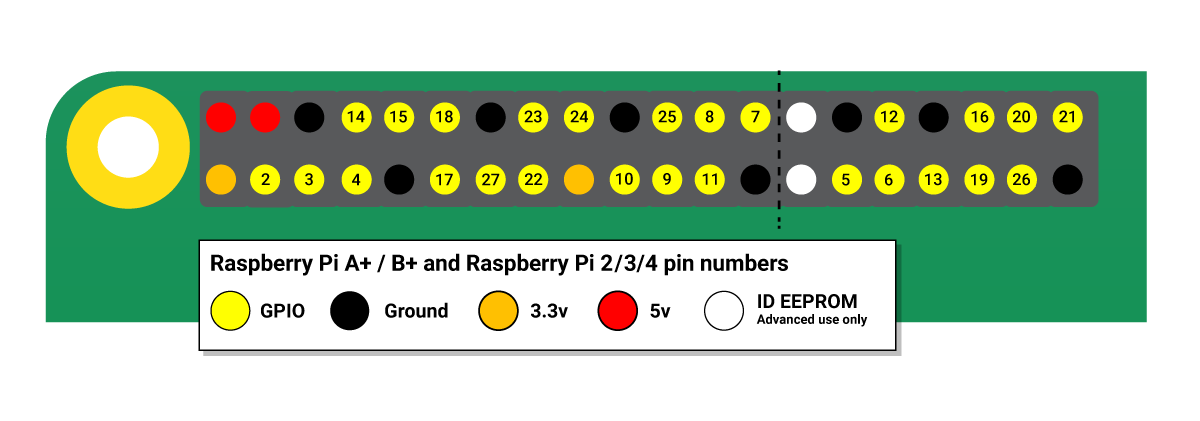
GPIO 引脚编号方案不按数字顺序排列。电路板上有 GPIO 引脚 0 和 1(物理引脚 27 和 28),但保留给高级用途。
输出
指定为输出引脚的 GPIO 引脚可设置为高电平(3.3V)或低电平(0V)。
输入
指定为输入引脚的 GPIO 引脚可读取为高电平(3.3V)或低电平(0V)。使用内部上拉或下拉电阻可以更方便地实现这一点。GPIO2 和 GPIO3 引脚具有固定的上拉电阻,其他引脚可通过软件进行配置。
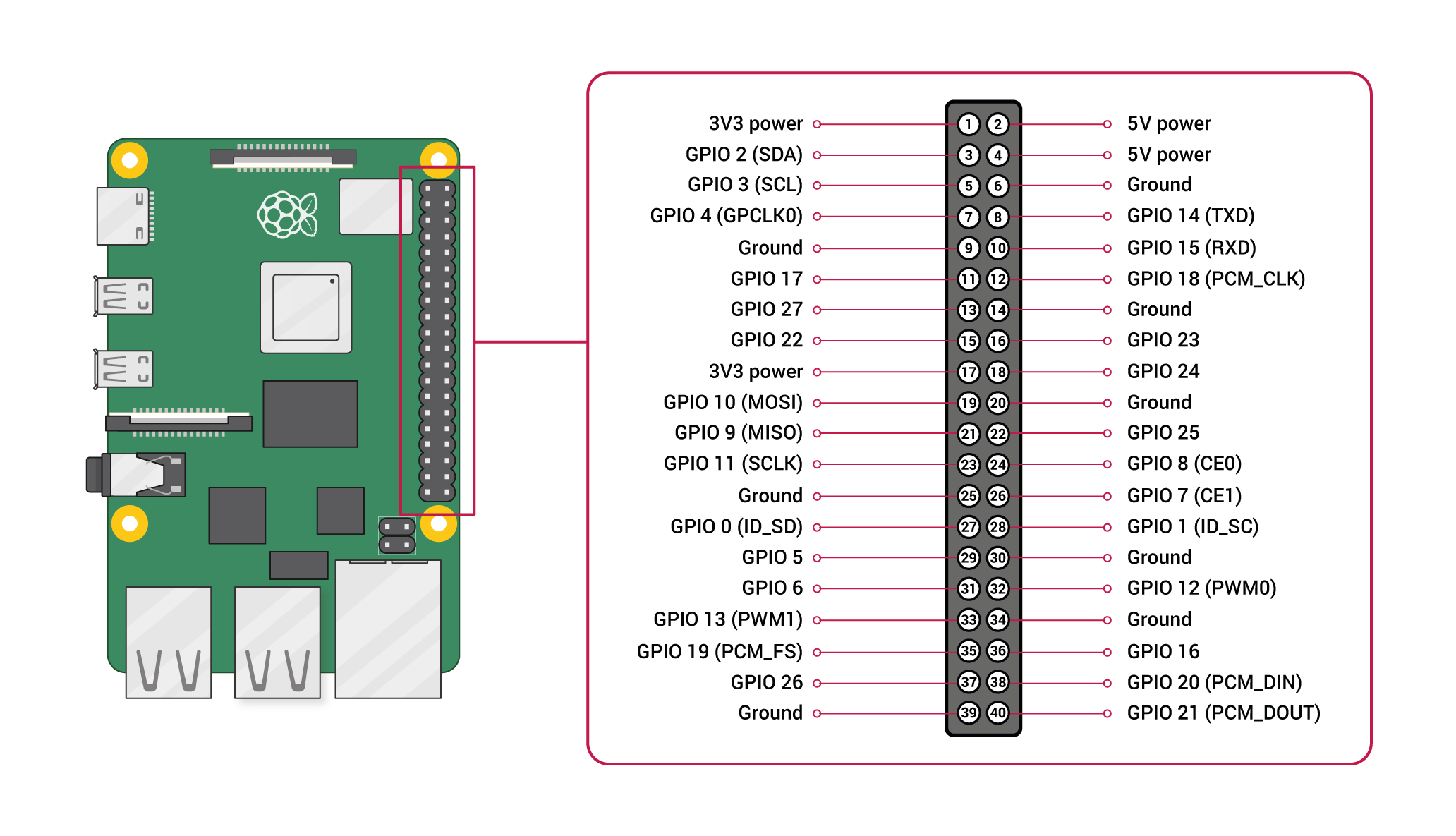
查看 Raspberry Pi 的 GPIO 引脚布局
打开终端窗口并运行 pinout 命令,即可在 Raspberry Pi 上访问 GPIO 参考信息。该工具由 GPIO Zero Python 库提供,Raspberry Pi OS 默认安装了该库。
虽然将简单元件连接到 GPIO 引脚是安全的,但接线时一定要小心。LED 应使用电阻来限制通过它们的电流。不要将 5V 电压用于 3.3V 元件。不要将电机直接连接到 GPIO 引脚,而应使用H-桥电路或电机控制器板。
权限
要使用 GPIO 端口,用户必须是 gpio 组的成员。默认用户账户是该组的成员,但必须使用以下命令手动添加其他用户:
sudo usermod -a -G gpio <用户名>
GPIO焊盘
BBCM2835 封装上的 GPIO 连接有时在外设数据表中被称为 "焊盘",这是一个半导体设计术语,意思是 "芯片与外界的连接"。
焊盘是可配置的 CMOS 推-拉驱动器/输入缓冲器。基于寄存器的控制设置可用于:
- 内部上拉/下拉启用/禁用
- 输出驱动强度
- 输入施密特触发滤波
开机状态
上电复位时,所有 GPIO 引脚都恢复为通用输入。默认上拉状态也会应用,详情请参阅 Arm 外设数据表中的备用功能表。大多数 GPIO 都应用了默认上拉状态。
中断
每个 GPIO 引脚在配置为通用输入时,都可配置为 Arm 的中断源。可配置多个中断源:
- 电平敏感(高/低)
- 上升/下降沿
- 异步上升沿/下降沿
电平中断保持中断状态,直到系统软件清除电平(例如,通过为产生中断的附加外设提供服务)。
正常的上升沿/下降沿检测内置了少量同步功能。以系统时钟频率对引脚进行采样,产生中断的标准是三个周期窗口内的稳定转换,即记录 1 0 0 或 0 1 1。异步检测绕过了这一同步过程,从而能够检测非常小的事件。
替代功能
几乎所有 GPIO 引脚都有替代功能。SoC 内部的外设块可以选择出现在一组 GPIO 引脚中的一个或多个引脚上,例如,I2C 总线可以配置到至少 3 个独立的位置。当引脚配置为替代功能时,驱动强度或施密特滤波等焊盘控制仍然适用。
有些功能可在所有引脚上使用,有些则在特定引脚上使用:
- PWM (脉宽调制)
- 所有引脚均可使用软件 PWM
- GPIO12, GPIO13, GPIO18, GPIO19 上可用的硬件 PWM
- SPI
- SPI0:MOSI(GPIO10);MISO(GPIO9);SCLK(GPIO11);CE0(GPIO8),CE1(GPIO7)
- SPI1:MOSI(GPIO20);MISO(GPIO19);SCLK(GPIO21);CE0(GPIO18);CE1(GPIO17);CE2(GPIO16)
- I2C
- 数据:(GPIO2);时钟(GPIO3)
- EEPROM 数据:(GPIO0)��;EEPROM 时钟(GPIO1)
- 串行通讯
- TX (GPIO14); RX (GPIO15)
电压规格
电路板上有两个 5V 引脚和两个 3.3V 引脚,以及一些无法重新配置的接地引脚 (GND)。其余引脚均为通用 3.3V 引脚,即输出设置为 3.3V,输入为 3.3V 容差。
下表给出了 BCM2835、BCM2836、BCM2837 和基于 RP3A0 的产品(如树莓派Zero或树莓派3+)的 GPIO 引脚的各种电压规格。有关CM的信息,请参阅相关数据表。
| 标签 | 参数 | 状况 | 最小 | 典型的 | 最大限度 | 单位 |
|---|---|---|---|---|---|---|
| VIL | 输入低电压 | - | - | - | 0.9 | V |
| VIH | 输入高压a | - | 1.6 | - | V | |
| IIL | 输入漏电流 | TA = +85°C | - | - | 5 | µA |
| CIN | 输入电容 | - | - | 5 | - | pF |
| VOL | 输出低电压b | IOL = -2mA | - | - | 0.14 | V |
| VOH | 输出高电压b | IOH = 2mA | 3.0 | - | - | V |
| IOL | 输出低电流c | VO = 0.4V | 18 | - | - | mA |
| IOH | 输出高电流c | VO = 2.3V | 17 | - | - | mA |
| RPU | 上拉电阻 | - | 50 | - | 65 | kΩ |
| RPD | 下拉电阻 | - | 50 | - | 65 | kΩ |
a 启用迟滞
b 默认驱动强度 (8mA)
c 最大驱动强度 (16mA)
下表列出了基于 BCM2711 的产品(4 系列器件)上 GPIO 引脚的电压规格。有关计算模块的信息,请参阅相关数据表。
| 标签 | 参数 | 状况 | 最小 | 典型的 | 最大限度 | 单位 |
|---|---|---|---|---|---|---|
| VIL | 输入低电压 | - | - | - | 0.8 | V |
| VIH | 输入高压a | - | 2.0 | - | V | |
| IIL | 输入漏电流 | TA = +85°C | - | - | 10 | µA |
| VOL | 输出低电压b | IOL = -4mA | - | - | 0.4 | V |
| VOH | 输出高电压b | IOH = 4mA | 2.6 | - | - | V |
| IOL | 输出低电流c | VO = 0.4V | 7 | - | - | mA |
| IOH | 输出高电流c | VO = 2.6V | 7 | - | - | mA |
| RPU | 上拉电阻 | - | 33 | - | 73 | kΩ |
| RPD | 下拉电阻 | - | 33 | - | 73 | kΩ |
a 启用迟滞
b 默认驱动强度 (8mA)
c 最大驱动强度 (16mA)
GPIO焊盘控制
GPIO 驱动强度并不指示最大电流,而是指示焊盘仍能满足规格要求的最大电流。为使设备正常工作,应设置与所连接设备相匹配的 GPIO 驱动强度。
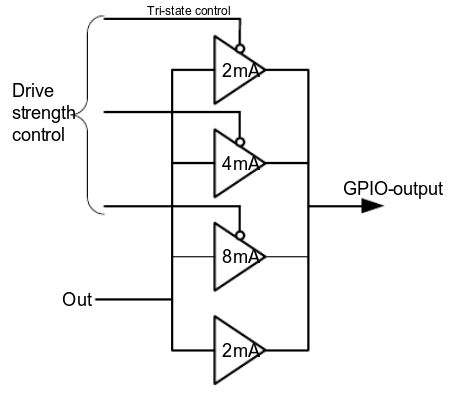
控制驱动强度
焊盘内部有多个并联驱动器。如果将驱动强度设置为低值(0b000),其中大部分驱动器都是三态的,因此不会增加任何输出电流。如果驱动强度增加,并联的驱动器就会越来越多。下图显示了这种情况。
在 4 系列设备上,电流电平为图中所示值的一半。
当前值
电流值规定了焊盘仍能满足规格要求的最大电流。
电流值不是焊盘将输出的电流,也不是电流限制。
焊盘输出是一个电压源:
- 如果设置为高电平,焊盘将尝试将输出驱动至轨压(3.3V)。
- 如果设置为低电平,焊盘将尝试将输出驱动至接地电压(0V)
焊盘将尝试驱动输出高电平或低电平。成功与否取决于连接的要求。如果焊盘对地短路,则无法驱动高电平。实际上,它将尽可能多地输出电流,而电流仅受内部电阻的限制。
如果焊盘被驱动到高电平,而它又与地短路,那么在适当的时候它就会失效。如果将其连接到 3.3V 并将其驱动为低电平,情况也是如此。
是否符合规范取决于保证电压水平。由于焊盘是数字信号,因此有两个电压电平,即高电平和低电平。I/O 端口有两个处理输出电平的参数:
- VOL,最大低电平电压(3.3V VDD IO 时为 0.14V)
- VOH,最低高电平电压(3.3V VDD IO 时为 3.0V)
VOL=0.14V 表示如果输出为低电平,电压将<= 0.14V。VOH=3.0V 表示如果输出为高电平,则电压 >= 3.0V。
举例来说,16mA 的驱动强度意味着,如果将焊盘设置为高电平,则可以消耗高达 16mA 的电流,并且保证输出电压 >=VOH。这也意味着,如果您将驱动强度设置为 2mA,并消耗 16mA 电流,电压将不是 VOH,而是更低。事实上,它可能还不够高,以至于外部设备无法将其视为高电平。
有关 GPIO 引脚物理特性的更多信息。
在计算模块设备上,可以将 VDD IO 从标准的 3.3V 改为别的值。在这种情况下,VOL 和 VOH 将根据GPIO表格中的情况发生变化。
Raspberry Pi 3.3V 电源的设计最大电流为每个 GPIO 引脚约 3mA。如果为每个引脚加载 16mA 电流,则总电流为 272mA。在这种负载水平下,3.3V 电源将崩溃。会出现大电流尖峰,尤其是在有电容负载的情况下。尖峰电流会在其附近的所有其他引脚上反弹。这很可能会对 SD 卡甚至 SDRAM 行为造成干扰。
安全电流
所有焊盘电子元件的设计电流均为 16mA。这个安全值不会损坏设备。即使将驱动强度设置为 2mA,然后加载到 16mA 输出,也不会损坏器件。除此之外,没有可保证的最大安全电流。
GPIO 地址
- 0x 7e10 002c 焊盘(GPIO 0-27)
- 0x 7e10 0030 焊盘(GPIO 28-45)
- 0x 7e10 0034 焊盘(GPIO 46-53)
| 位 | 字段名称 | 描述 | 类型 | 重置 |
|---|---|---|---|---|
| 31:24 | PASSWRD | 写入时必须为0x5A;意外写保护密码 | 写 | 0 |
| 23:5 | 保留- 写为 0,读无关 | |||
| 4 | SLEW | 转换率;0 = 转换速率受限;1 = 转换速率不受限制 | 读写 | 0x1 |
| 3 | HYST | 启用输入迟滞;0 = 禁用;1 = 启用 | 读写 | 0x1 |
| 2:0 | DRIVE | 驱动强度,参见下面的细分列表 | 读写 | 0x3 |
请注意 SSO(同步开关输出)的限制,它不仅取决于设备,还取决于 PCB 的质量和布局、去耦电容器的数量和质量、焊盘上的负载类型(电阻、电容)以及树莓派无法控制的其他因素。
驱动强度列表
- 0 = 2mA
- 1 = 4mA
- 2 = 6mA
- 3 = 8mA
- 4 = 10mA
- 5 = 12mA
- 6 = 14mA
- 7 = 16mA
树莓派的工业用途
树莓派经常作为其他产品的一部分使用。本文档介绍了一些可用于使用树莓派其他功能的额外设施。
一次性可编程设置
在树莓派单板计算机上使用一次性可编程内存
所有树莓派单板计算机(SBC)都有一个内置的一次性可编程(OTP)内存区域,它实际上是芯片上主系统(SoC)的一部分。顾名思义,OTP 内存只能被写入一次(即二进制 0 变为 1)。观察 OTP 的一种方法是将每个位视为保险丝。编程时需要故意烧断保险丝,这是一个不可逆的过程,因为你无法进入芯片内部更换保险丝!
本白皮书假定树莓派正在运行树莓派操作系统 (OS),并且完全是最新的固件和内核。
有许多 OTP 值可以使用。要查看所有 OTP值 的列表,运行如下命令:
vcgencmd otp_dump
转储中一些有趣的行数如下
- 28 - 序列号
- 29 - 序列号的一元补码
- 30 - 电路板修订号
此外,从 36 到 43(含),有 8 行 32 位可供客户使用
在 BCM2712 设备上,这些数字有所不同。第 31 行是序列号,第 32 行是电路板修订号。客户可自定义行为 77 至 84(含)。
其中一些行可以使用 vcmailbox 进行编程。这是一个连接固件的 Linux 驱动程序接口,用于处理行的编程。为此,请参阅文档和 vcmailbox 示例应用程序。
vcmailbox 应用程序可在树莓派OS上直接通过命令行使用。示例用法如下
vcmailbox 0x00010004 8 8 0 0
返回值如下
0x00000020 0x80000000 0x00010004 0x00000008 0x800000008 0xnnnnnnnnnn 0x00000000 0x00000000
上述操作使用了邮箱属性接口 GET_BOARD_SERIAL,请求大小为 8 字节,响应大小为 8 字节(请求发送两个整数 0、0)。响应将是两个整数(0x00000020 和 0x80000000),然后是标签代码、请求长度、响应长度(设置第 31 位表示响应),然后是 64 位序列号(其中 MS 32 位始终为 0)。
写入和读取客户OTP值
OTP 值是一次性可编程的,一旦某个位从 0 变为 1,就不能再变回原来的值。
要设置客户 OTP 值,需要使用 SET_CUSTOMER_OTP (0x38021) 标签,如下所示:
vcmailbox 0x00038021 [8 + number * 4] [8 + number * 4] [start_num] [number] [value] [value] [value] ...
- start_num = 从 0-7 开始编程的第一行
- number = 要编程的行数
- value = 要编程的每个值
因此,要将 OTP 客户第 4、5 和 6 行分别编程为 0x11111111、0x22222222、0x33333333,您可以使用
vcmailbox 0x00038021 20 20 4 3 0x11111111 0x22222222 0x33333333
这样就可以对第 40、41 和 42 行进行编程。
要读回这些值,可以使用
vcmailbox 0x00030021 20 20 4 3 0 0 0
将显示
0x0000002c 0x80000000 0x00030021 0x00000014 0x80000014 0x00000000 0x00000003 0x11111111 0x22222222 0x33333333
如果您想将此功能集成到自己的代码中,可以使用 vcmailbox.c 代码作为示例。
在非BCM2712设备上锁定OTP
可以锁定 OTP 更改,以避免再次编辑。
这可以使用 OTP 写入maibox的特殊参数来实现:
vcmailbox 0x00038021 8 8 0xffffffff 0xaffe0000
一旦锁定,客户 OTP 值就不能再被更改。请注意,此锁定操作是不可逆的。
在BCM2712设备上锁定OTP
可以使用以下命令将客户区域标记为只读。
vcmailbox 0x00030086 4 4 0
OTP 仅在重置设备之前锁定,因此每次启动时都需要重新应用 OTP 锁。
在非BCM2712设备上使客户OTP位不可读
可以完全防止客户 OTP 位被读取。这可以通过使用 OTP 写入mailbox的特殊参数来实现:
vcmailbox 0x00038021 8 8 0xffffffff 0xaffebabe
这种操作对绝大多数用户来说都不可能有用,而且是不可逆的。
在BCM2712设备上由客户定义MAC地址
在 BCM2712 设备上,以太网、Wifi 和蓝牙 MAC 地址设置在 OTP 内存中。可以用客户值更改这些值。
获取客户 MAC 地址 vcmailbox 0x00030082/3/4 6 6 0 0 其中 2 表示 以太网,3 表示 Wi-Fi,4 表示 蓝牙:
vcmailbox 0x00030083 6 6 0 0
0x00000020 0x80000000 0x00030083 0x00000006 0x80000006 0xddccbbaa 0x0000ffee 0x00000000
要设置客户 mac 地址,必须以两个 32 字节的形式发送,字节顺序要正确。您可以运行命令检查格式是否正确:
vcmailbox 0x00030085 6 6 0x44332211 0x6655
检查日志,查看 MAC 地址是否符合您的预期:
sudo vclog -m
1057826.701: read mac address 11:22:33:44:55:66
多播地址不被视为有效地址。MAC 地址最八位位组中的最小有效位是组播位,因此请确保该位未被设置。
然后,您可以使用命令 vcmailbox 0x00038082/3/4 6 6 <row1> <row0> 设置客户 MAC 地址:
示例...
vcmailbox 0x00038082 6 6 0x44332211 0x6655
如果客户的 MAC 地址被设置为 ff:ff:ff:ff:ff:ff:ff,则会被忽略。
设备专用私人密钥
使用 Broadcom BCM2712 处理器的设备有 16 行 OTP 数据(512 位),支持文件系统加密。 不使用 BCM2712 的设备有 8 行 OTP 数据(256 位)可用作设备专用私钥。
可以使用与管��理客户 OTP 行类似的 vcmailbox 命令对这些行进行编程和读取。如果不需要安全启动/文件系统加密,则设备私钥行可用于存储通用信息。
- 设备私钥行只能通过
vcmailbox命令读取,该命令要求访问/dev/vcio,而/dev/vcio在树莓派OS上仅限于video组。 - 树莓派电脑没有受硬件保护的密钥存储空间。建议将此功能与 secure-boot 结合使用,以限制对该数据的访问。
- 树莓派OS不支持加密的根文件系统。
有关开源磁盘加密的更多信息,请参阅 cryptsetup。
使用 rpi-otp-private-key 将密钥编程到 OTP 中
rpi-otp-private-key 脚本封装了设备私钥 vcmailbox API,使读写 OpenSSL 格式的密钥变得更容易。
usbboot 资源库包含您需要的所有工具,包括作为 Git 子模块的 rpi-eeprom。
将 32 字节密钥读取为 64 个字符的十六进制数:
cd usbboot/tools
rpi-otp-private-key
输出示例
f8dbc7b0a4fcfb1d706e298ac9d0485c2226ce8df7f7596ac77337bd09fbe160
将随机生成的 32 字节数字写入设备私钥。
此操作无法撤销
rpi-otp-private-key -w $(openssl rand -hex 32)
用于读取/写入密钥的mailbox API
要指定要使用的 OTP 行数,请输入 -l <word count>。要指定密钥存储区的起始位置,请输入 -o <word offset>。
读取所有行。
vcmailbox 0x00030081 40 40 0 8 0 0 0 0 0 0 0 0 0 0
输出示例
0x00000040 0x80000000 0x00030081 0x00000028 0x80000028 0x00000000 0x00000008 0xf8dbc7b0 0xa4fcfb1d 0x706e298a 0xc9d0485c 0x2226ce8d 0xf7f7596a 0xc77337bd 0x09fbe160 0x00000000
写入所有行(用密�钥数据替换尾部的 8 个 0)
vcmailbox 0x00038081 40 40 0 8 0 0 0 0 0 0 0 0 0 0
写入上一示例中显示的密钥
vcmailbox 0x38081 40 40 0 8 0xf8dbc7b0 0xa4fcfb1d 0x706e298a 0xc9d0485c 0x2226ce8d 0xf7f7596a 0xc77337bd 0x09fbe160
OTP寄存器和位定义
树莓派系列使用的所有 SoC 都有一个内置的一次性可编程 (OTP) 存储器块。少数位置有出厂编程数据。
OTP 存储器大小:
- 非 BCM2712 设备: 66 个 32 位值
- BCM2712 设备: 192 个 32 位值
要显示 OTP 的内容,请运行以下命令:
vcgencmd otp_dump
非BCM2712设备上的OTP寄存器
此列表包含寄存器的公开信息。如果此处未定义寄存器或位,则该寄存器或位不公开。
16– OTP 控制寄存器 – BCM2711- 第 26 位:禁用 VC JTAG
- 第 27 位:禁用 VC JTAG
17- 启动模式寄存器- 第 1 位:将振荡器频率设置为 19.2MHz
- 第 3 位:启用 SDIO 引脚的上拉功能
- 第 15 位:禁用 ROM RSA 密钥 0 –(如果已设置,则启用安全启动)(BCM2711)
- 第 19 位:启用 GPIO 启动模式
- 第 20 位:设置检查 GPIO 启动模式的存储体
- 第 21 位:启用从 SD 卡启动
- 第 22 位:设置从bank启动
- 第 28 位:启用 USB 设备启动
- 第 29 位:启用 USB 主机启动(以太网和大容量存储器)
在 BCM2711 上,启动模式由bootloader EEPROM 配置定义,而不是 OTP。
18- 引导模式寄存器副本28- 序列号29- ~(序列号)30- 修订代码 133– 扩展的电路板修订代码 – 含义取决于电路板型号。
可通过/proc/device-tree/chosen/rpi-boardrev-ext中的device-tree获取,出于测试目的,可通过在config.txt中设置board_rev_ext来临时覆盖此 OTP 值。- CM 4
- 第 30 位:计算模块是否安装了 WiFi 模块
- 0 – WiFi
- 1 – 无 WiFi
- 第 31 位:计算模块是否安装了 EMMC 模块
- 0 – EMMC
- 1 – 无 EMMC(精简版)
- 第 30 位:计算模块是否安装了 WiFi 模块
- 树莓派400
- 第 0-7 位:piwiz 使用的默认键盘国家代码
- CM 4
35- 64 位序列号的高 32 位36-43- 客户 OTP 值45- MPG2 解码键46- WVC1 解码密钥47-54- 用于安全启动的 RSA 公钥的 SHA25655- 安全启动标志(保留给引导加载程序使用)56-63- 256 位设备专用私人密钥64-65- MAC 地址;如果设置,系统将优先使用该地址,而不是根据序列号自动生成的地址66- 高级启动寄存器(非 BCM2711)- 第 0-6 位:用于 ETH_CLK 输出引脚的 GPIO
- 第 7 位:启用 ETH_CLK 输出
- 第 8-14 位:LAN_RUN 输出引脚的 GPIO
- 第 15 位:启用 LAN_RUN 输出
- 第 24 位:扩展 USB HUB 超时参数
- 第 25 位:ETH_CLK 频率:
- 0 – 25MHz
- 1 – 24MHz
1 还包含禁用过压、OTP 编程和 OTP 读取的位。
BCM2712器件上的OTP寄存器
本列表包含寄存器的公开信息。如果此处未定义寄存器或位,则该寄存器或位不公开。
22- 启动模式寄存器- 第 1 位:从 SD 卡启动
- 第 2-4 位:从 SPI EEPROM(以及 GPIO)启动
- 第 10 位:禁止从 SD 卡启动
- 第 11 位:禁止从 SPI 启动
- 第 12 位:禁止从 USB 启动
23- 复制引导模式寄存器29- 高级启动模式- 第 0-7 位:用于 SD 卡检测的 GPIO
- 第 8-15 位:用于 RPIBOOT 的 GPIO
31- 序列号的低 32 位32- 修订代码33– 电路板属性 – 含义取决于电路板型号。
可通过/proc/device-tree/chosen/rpi-boardrev-ext中的设备树查看。35- 序列号的上 32 位
完整的 64 位序列号在/proc/device-tree/serial-number中提供50-51- 以太网 MAC 地址
该地址在设备树中传递给操作系统,例如/proc/device-tree/axi/pcie@120000/rp1/ether@100000/local-mac-address。52-53- Wifi MAC 地址
在设备树中传递给操作系统,例如/proc/device-tree/axi/mmc@1100000/wifi@1/local-mac-address54-55- 蓝牙 MAC 地址 在设备树中传递给操作系统,例如 /proc/device-tree/soc/serial@7d50c000/bluetooth/local-bd-address。77-84- 客户 OTP 值86– 板国家 – piwiz 使用的默认键盘国家代码
如果已设置,可通过 /proc/device-tree/chosen/rpi-country-code 中的设备树查看87-88- 客户以太网 MAC 地址
如果已设置,则覆盖 OTP 第 50-51 行89-90- 客户 Wifi MAC 地址
如果设置,覆盖 OTP 第 52-53 行89-90- 客户蓝牙 MAC 地址
如果设置,则覆盖 OTP 第 54-55 行109-114- 出厂设备 UUID
目前为 16 位数字 ID,应与设备上的条形码一致。用 0 字符填充并用 c40 编码。
可通过 /proc/device-tree/chosen/rpi-duid 中的设备树获取该 ID。
用于 PCIe �的 Raspberry Pi 连接器
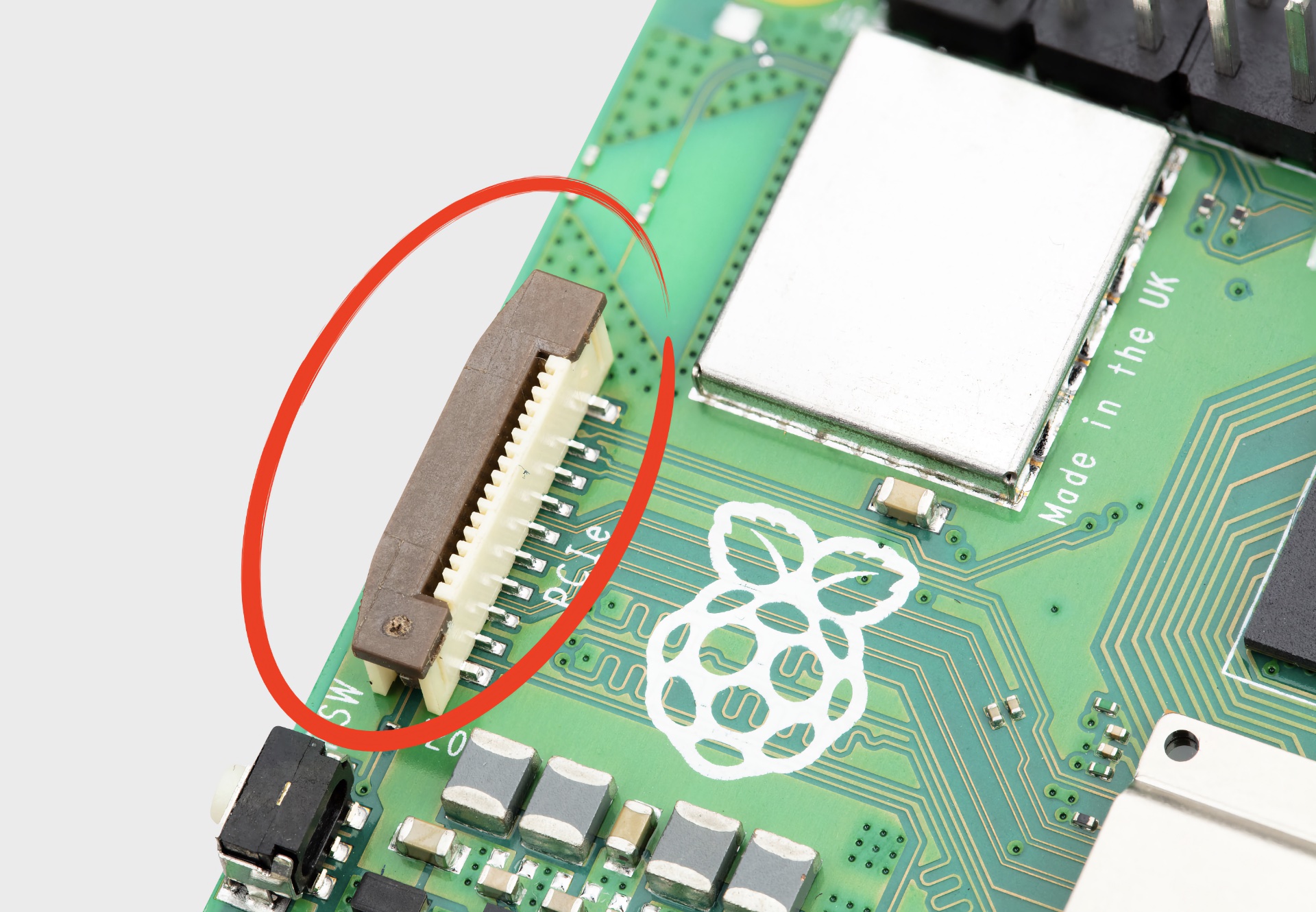
Raspberry Pi 5 的电路板左侧有一个 FPC 连接器。该连接器为快速外设提供了 PCIe Gen 2.0 ×1 接口。
要连接 PCIe HAT+设备,请将其连接到树莓派。Raspberry Pi 会自动检测到该设备。要连接非 HAT+ 设备,请将其连接到 Raspberry Pi,然后手动启用 PCIe。
有关 PCIe FPC 连接器引脚分配以及创建第三方设备、配件和 HAT 所需的其他详细信息,请参阅 Raspberry Pi 的 PCIe 连接器 标准文档。应与 Raspberry Pi HAT+ 规范 一并阅读。
在交换机后面枚举 PCIe 设备 当前不支持。
启用 PCIe
默认情况下,除非连接到 HAT+ 设备,否则 PCIe 连接器不会启用。要启用该连接器,请在 /boot/firmware/config.txt 中添加以下一行:
dtparam=pciex1
使用 sudo reboot 重新启动,使配置更改生效。
注意:也可以使用别名 nvme。
从 PCIe 启动
默认情况下,Raspberry Pi 设备不会从 PCIe 存储启动。要启用从 PCIe 启动,请更改引导加载程序配置中的 BOOT_ORDER。使用以下命令编辑 EEPROM 配置:
sudo rpi-eeprom-config --edit
用下面一行替换 BOOT_ORDER 行:
BOOT_ORDER=0xf416
要从非 HAT+ 设备启动,还需添加以下一行:
PCIE_PROBE=1
保存更改后,使用 sudo reboot 重启 Raspberry Pi 以更新 EEPROM。
PCIe Gen 3.0
Raspberry Pi 5 未通过 Gen 3.0 速度认证。PCIe Gen 3.0 连接可能不稳定。
默认情况下,Raspberry Pi 5 使用 Gen 2.0 速度(5 GT/s)。使用以下方法之一强制使用 Gen 3.0(8 GT/s)速度:
- config.txt
- raspi-config
要启用 PCIe Gen 3.0 速度,请在 /boot/firmware/config.txt 中添加以下行:
dtparam=pciex1_gen=3
使用 sudo reboot 重启 Raspberry Pi,使这些设置生效。
运行以下命令打开 Raspberry Pi 配置 CLI:
sudo raspi-config
完成以下步骤以启用 PCIe Gen 3.0 速度:
- 选择
Advanced Options。 - 选择
PCIe Speed。 - 选择
Yes启用 PCIe Gen 3 模式。 - 选择
Finish退出。 - 使用
sudo reboot重启 Raspberry Pi,使这些设置生效。
电源按钮
本节仅适用于带有电源按钮的 Raspberry Pi 型号,如 Raspberry Pi 5。
当你第一次将 Raspberry Pi 插入电源时,它会自动打开并启动进入操作系统,而无需按下按钮。
如果你运行的是 Raspberry Pi Desktop,你可以通过短按电源按钮来启动一次干净的关机。这时会出现一个窗口,询问你是要关机、重启还是注销。
选择一个选项或再次按下电源按钮以启动清洁关机。
如果运行的是 Raspberry Pi Desktop,可以连续快速按两次电源按钮关机。如果您运行的是 Raspberry Pi OS Lite 而没有桌面,则只需按一次电源按钮即可启动关机。
重新启动
如果 Raspberry Pi 电路板已关闭,但仍连接着电源,按下电源按钮即可重启电路板。
注意:重置电源管理集成电路(PMIC)也可以重启电路板。连接 HAT 可以重置 PMIC。在连接 HAT 之前,请务必断开设备与电源的连接。
强制关机
要强制硬关机,请按住电源按钮。
添加自己的电源按钮
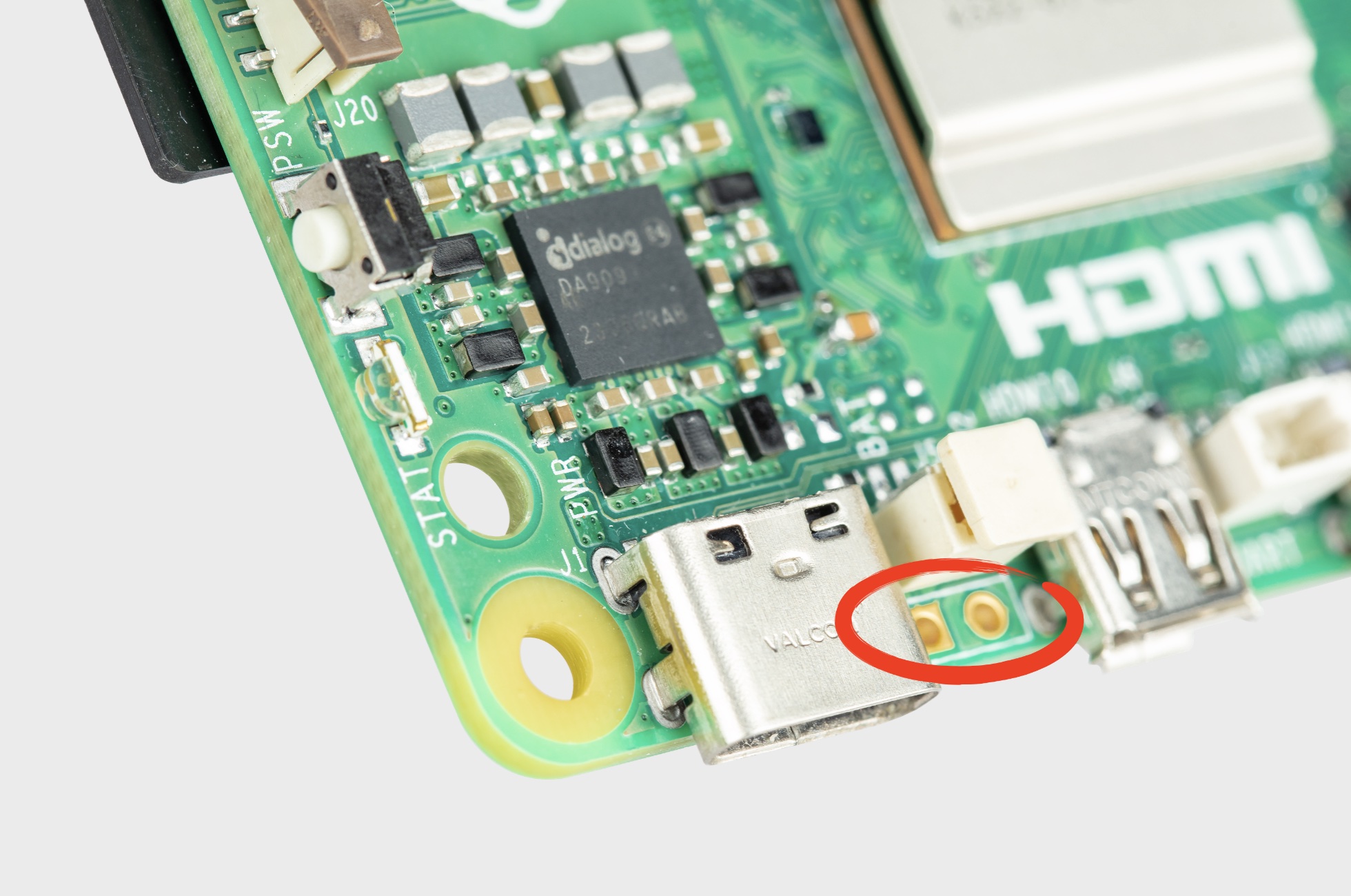
J2跳线
J2 跳线位于 RTC 电池连接器和电路板边缘之间。通过在这两个焊盘之间添加一个常开(NO)瞬时开关,您就可以在 Raspberry Pi 5 上添加自己的电源按钮。短暂闭合该开关将执行与板载电源按钮相同的操作。
电源
不同型号的树莓派对电源的要求也不同。所有型号都需要 5.1V 电源,但所需电流一般会根据型号而增加。树莓派3以下的所有型号都需要微型 USB 电源连接器,而 树莓派4 、400 和 树莓派5 则使用 USB-C 连接器。
每个 Raspberry Pi 消耗的电流取决于所连接的外设。
推荐电源
对于 Raspberry Pi 1、Raspberry Pi 2 和 Raspberry Pi 3,我们推荐使用 2.5A微型 USB 电源。对于 Raspberry Pi 4 和 Raspberry Pi 400,我们推荐使用 适用于 Raspberry Pi 4 的 3A USB-C 电源。对于 Raspberry Pi 5,我们推荐使用 27W USB-C 电源。
没有任何 Raspberry Pi 型号支持 USB-PPS。
如果使用第三方 USB-PD 多端��口电源,在连接 Raspberry Pi 时将其他设备插入电源会导致电源和 Raspberry Pi 之间重新协商。如果 Raspberry Pi 处于通电状态,则会无缝连接。如果 Raspberry Pi 关机,这种重新协商可能会导致 Raspberry Pi 启动。
以太网供电(PoE)连接器
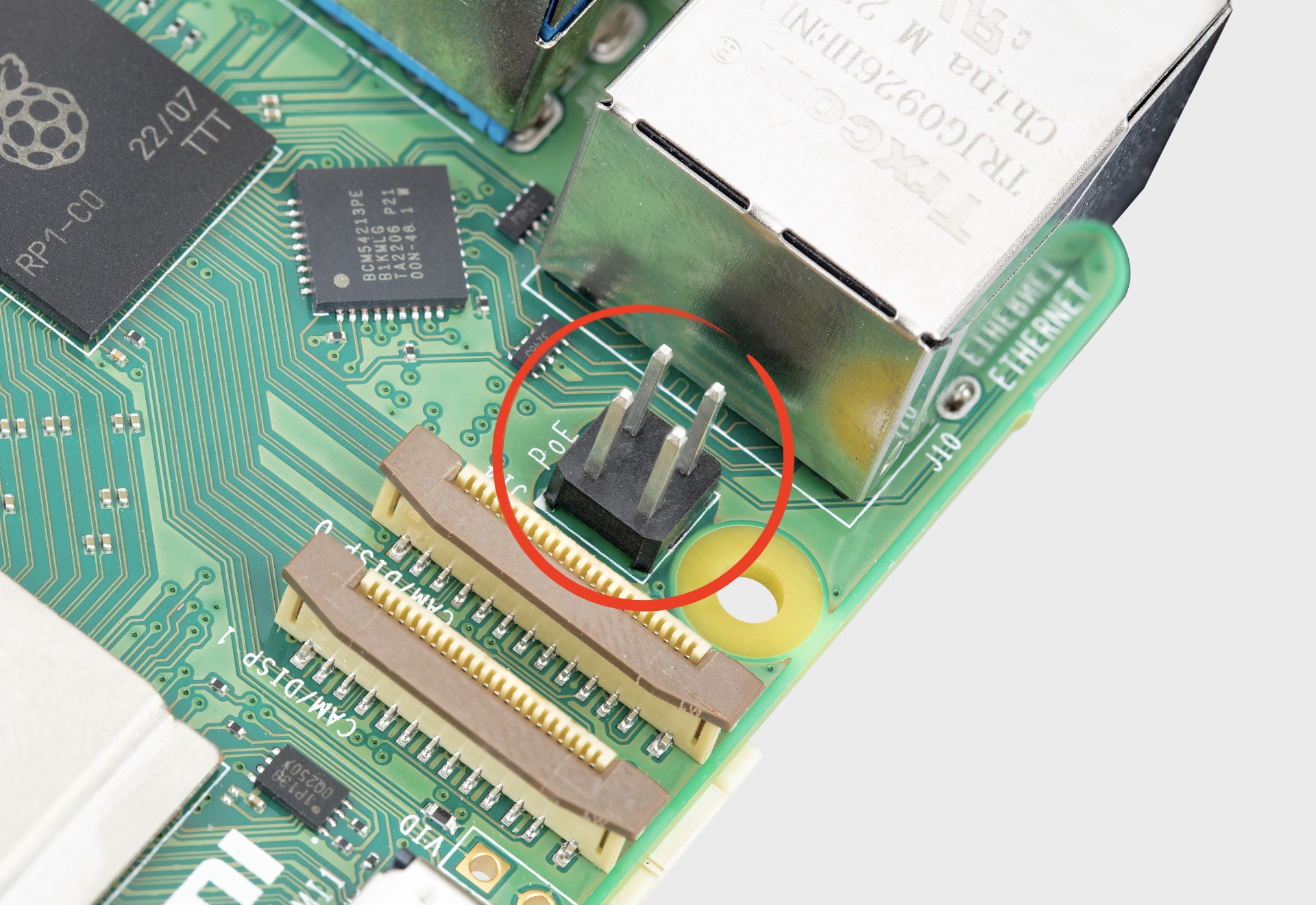
Raspberry Pi 5 PoE 接口
Raspberry Pi 5 上的以太网插孔具有 PoE+ 功能,支持 IEEE 802.3at-2009 PoE 标准。
Raspberry Pi 4B 和 Pi 3B+ 的以太网插孔具有 PoE 功能,支持 IEEE 802.3af-2003 PoE 标准。
所有带有支持 PoE 的以太网插孔的 Raspberry Pi 型号都需要一个 HAT 才能通过以太网端口获取电源。对于支持 PoE 的型号,我们推荐使用 PoE HAT。对于支持 PoE+ 的型号,我们推荐使用 PoE+ HAT。
典型电源要求
各型号的具体功率要求如下所示。
| 产品 | 推荐电源电流容量 | USB 外设最大总电流消耗 | 典型裸板有功电流消耗 |
|---|---|---|---|
| 树莓派1A | 700mA | 500mA | 200mA |
| 树莓派1B | 1.2A | 500mA | 500mA |
| 树莓派1A+ | 700mA | 500mA | 180mA |
| 树莓派1B+ | 1.8A | 1.2A | 330mA |
| 树莓派2B | 1.8A | 1.2A | 350mA |
| 树莓派3B | 2.5A | 1.2A | 400mA |
| 树莓派3A+ | 2.5A | 仅受 PSU、电路板和连接器额定值的限制。 | 350mA |
| 树莓派3B+ | 2.5A | 1.2A | 500mA |
| 树莓派4B | 3.0A | 1.2A | 600mA |
| 树莓派5 | 5.0A | 1.6A(如使用3A电源,则最大电流为600mA) | 800mA |
| 树莓派400 | 3.0A | 1.2A | 800mA |
| 树莓派500 | 5.0A | 1.6A(如使用3A电源,则最大电流为600mA) | 800mA |
| 树莓派500+ | 5.0A | 1.6A | 800mA (LED灯关闭且固态硬盘处于非活动状态) |
| 树莓派Zero | 1.2A | 仅受 PSU、电路板和连接器额定值的限制。 | 100mA |
| 树莓派Zero W | 1.2A | 仅受 PSU、电路板和连接器额定值的限制。 | 150mA |
| 树莓派Zero 2W | 2A | 仅受 PSU、电路板和连接器额定值的限制。 | 350mA |
Raspberry Pi 5 在+5V(25W)电压下可提供 5A 电流时,可为下游 USB 外围设备提供 1.6A 电流。当连接到任何其他兼容电源时,Raspberry Pi 5 将下游 USB 设备的功率限制为 600mA。
大多数 Raspberry Pi 都能为 USB 外围设备提供足够的电流,为大多数 USB 设备供电,包括键盘、鼠标和适配器。不过,有些设备需要额外的电流,包括调制解调器、外置磁盘和高功率天线。要连接电源要求超过上表规定值的 USB 设备,请使用外部供电的 USB 集线器进行连接。
随着您使用 Raspberry Pi 上的各种接口,Raspberry Pi 对电源的要求也会增加。GPIO 引脚总计可安全地消耗 50mA 电流;每个引脚可单独消耗高达 16mA 电流。HDMI 端口的电流为 50mA。摄像头模块需要 250mA。USB 键盘和鼠标的电流可低至 100mA,也可高达 1000mA。检查您计划连接到 Raspberry Pi 的设备的额定功率,并购买相应的电源。如果不确定,请使用外部供电的 USB 集线器。
运行以下命令检查 USB 端口的电源输出状态:
vcgencmd get_config usb_max_current_enable
下表描述了不同型号的树莓派在各种工作负载下消耗的电流(单位为安培):
| 树莓派1B+ | 树莓派2B | 树莓派3B | 树莓派Zero | 树莓派4B | ||
|---|---|---|---|---|---|---|
| 启动 | 最大 | 0.26 | 0.40 | 0.75 | 0.20 | 0.85 |
| 平均 | 0.22 | 0.22 | 0.35 | 0.15 | 0.7 | |
| 空闲 | 平均 | 0.20 | 0.22 | 0.30 | 0.10 | 0.6 |
| 视频回放(H.264) | 最大 | 0.30 | 0.36 | 0.55 | 0.23 | 0.85 |
| 平均 | 0.22 | 0.28 | 0.33 | 0.16 | 0.78 | |
| 压力 | 最大 | 0.35 | 0.82 | 1.34 | 0.35 | 1.25 |
| 平均 | 0.32 | 0.75 | 0.85 | 0.23 | 1.2 | |
| 停止电流 | 0.10 | 0.055 | 0.023 |
在这些测量中,我们使用了标准的树莓派OS映像(截至 2016 年 2 月 26 日,树莓派4则截至 2019 年 6 月),在室温下,树莓派与 HDMI 显示器、USB 键盘和 USB 鼠标相连。树莓派3B连接到无线局域网接入点,树莓派4连接到以太网。所有这些功率测量值都是近似值,没有考虑额外 USB 设备的功耗;如果多个额外 USB 设备或 HAT 连接到树莓派,功耗很容易超过这些测量值。
Raspberry Pi 4、5 和 CM4 上使用了许多不同的 PMIC 器件。所有 PMIC 除了提供电压供应外,还提供额外的功能。本文档介绍了如何通过软件访问这些功能。
降低 Raspberry Pi 5 关机时的功耗
默认情况下,Raspberry Pi 5 关机时的功耗约为 1W 至 1.4W。可以通过使用 sudo rpi-eeprom-config -e 手动编辑 EEPROM 配置来降低功耗。编辑设置并添加
power_off_on_halt=1
这样,掉电时的功耗应降至 0.01W 左右。
电源警告
自树莓派B+(2014 年)以来,除 Zero 系列外,所有型号的树莓派都有低电压检测电路,可以检测到电源电压是否降至 4.63V(+/- 5%)以下。这将导致在内核日志中添加一条记录。
如果看到警告,请更换质量更高的电源和电缆。低质量电源会损坏存储或导致 Raspberry Pi 出现不可预测的行为。
电压下降的原因有很多。您可能插入了太多高要求的 USB 设备。电源可能不足。或者电源线使用的电线太细。
树莓派设备经常被用作数据存储和监控设备,并经常用于可能会突然断电的地方。与任何计算设备一样,断电可能会导致存储损坏。
本白皮书提供了一些选项,说明如何通过选择适当的文件系统和设置来确保数据完整性,从而防止数据在这些和其他情况下损坏。
电源和 Raspberry Pi OS
引导加载程序通过设备树 /proc/device-tree/chosen/power传递有关电源的信息。用户通常不会直接读取。
max_current:
最大电流(毫安)
uspd_power_data_objects:
PDOs 的转储 - 供高级用户调试
usb_max_current_enable:
电流限制器是否设置为高电平或低电平
usb_over_current_detected:
在将控制权转移到操作系统之前,启动过程中是否发生 USB 过流
reset_event:
PMIC 复位原因,例如看门狗、过压或欠压、过热。
PMIC 内置 ADC,除其他外,可以测量电源电压 EXT5V_V。使用以下命令查看 ADC 测量值:
vcgencmd pmic_read_adc
您无法看到 USB 电流或其他直接连接到 5V 的电流,因为这会绕过 PMIC。您不应该指望它增加到源电源的功率。不过,这对监控内核电压等非常有用。
反向供电
USB 规范要求 USB 设备不得向上游设备提供电流。如果 USB 设备向上游设备提供电流,则称为反向供电。这种情况通常发生在连接了劣质的供电 USB 集线器时,会导致供电 USB 集线器向树莓派主机供电。不建议这样做,因为通过集线器向树莓派供电会绕过树莓派内置的保护电路,使其在电源浪涌时容易受�到损坏。
实时时钟 (RTC)
树莓派5搭载了一个实时时钟(RTC)模块。该模块可通过板载J5(BAT)接口接入电池供电。当元件朝上且徽标方向正确时,J5接口位于电路板左近角处,紧邻USB-C电源接口右侧。
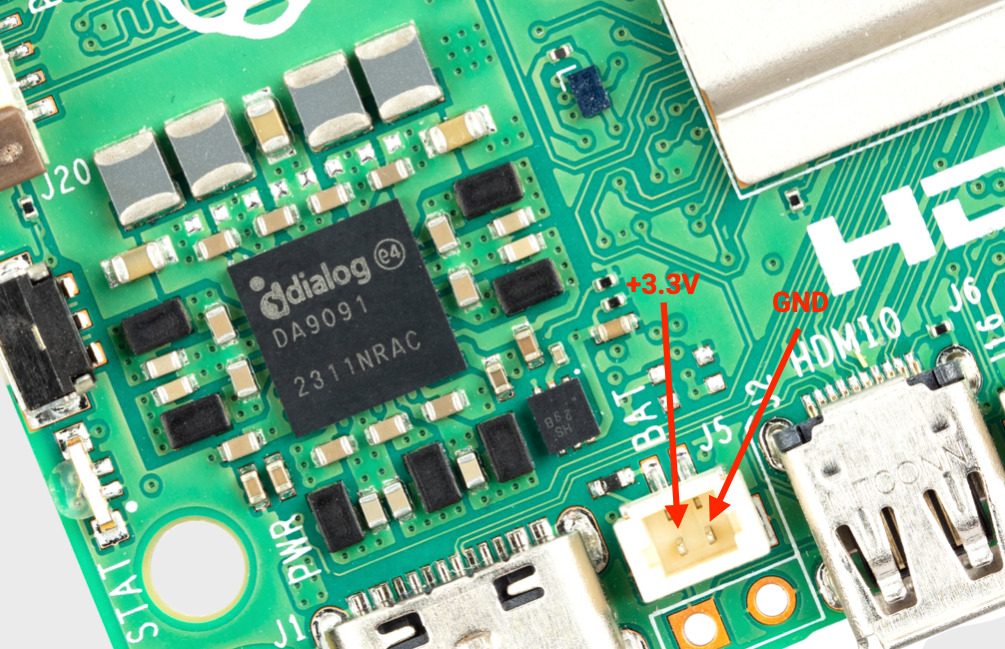
J5电池连接器
您可以设置唤醒闹钟,该功能将使开发板进入超低功耗状态(约3毫安)。当达到闹钟时间时,开发板将重新启动。此功能适用于定时任务,例如延时摄影。
要启用唤醒闹钟的低功耗模式:.
- 编辑引导程序配置。
sudo -E rpi-eeprom-config --edit
- 添加以下两行。
POWER_OFF_ON_HALT=1
WAKE_ON_GPIO=0
您可以使用以下方法测试功能:
echo +600 | sudo tee /sys/class/rtc/rtc0/wakealarm
sudo halt
这将使开发板停机并进入低功耗的状态,然后在10分钟后唤醒并重新启动。
RTC 还能在启动时提供时间,例如在 dmesg 中,以满足无法访问 NTP 的用例:
[ 1.295799] rpi-rtc soc:rpi_rtc: setting system clock to 2023-08-16T15:58:50 UTC (1692201530)
即使J5插口上没有连接备用电池,RTC仍然可用。
添加备用电池
官方提供的电池部分是可充电锂锰纽扣电池,预装有两针 JST-SH 插头和粘贴垫。这适合在电路板主电源断开时为 RTC 供电。由于断电时的电流为个位数 µA,因此保持时间以月为单位。
我们不建议将主(不可充电)锂电池用于 RTC。RTC 备用电流消耗高于大多数专用 RTC 模块,因此使用寿命较短。
请勿将锂离子电池用于 RTC。
![锂锰可充电RTC电池]](/img/computers/raspberry-pi-5/rtc-battery.jpg)
锂锰可充电RTC电池
官方电池模块是可充电锂锰纽扣电池,带有预装的两针JST插头和粘合安装垫。这适用于在树莓派5的主电源断开时为RTC供电,断电电流消耗为个位数µA,从而提供可以以月为单位的持续时间。
启用电池充电
RTC 配备了恒流(3mA)恒压充电器。
电池充电默认为禁用。有一些 sysfs 文件可显示充电电压和限制:
$ grep . /sys/class/rtc/rtc0/charging_voltage*
/sys/class/rtc/rtc0/charging_voltage:0
/sys/class/rtc/rtc0/charging_voltage_max:4400000
/sys/class/rtc/rtc0/charging_voltage_min:1300000
要以设定电压为电池充电,请在 /boot/firmware/config.txt"中添加 rtc_bbat_vchg:
dtparam=rtc_bbat_vchg=3000000
使用 sudo reboot 重新启动,以使用新的电压设置。检查 sysfs 文件,确保��充电电压设置正确。
禁用电池充电
要停止充电,请删除 config.txt 中包含 rtc_bbat_vchg 的所有行。
串行外设接口(SPI)
树莓派计算机配备了许多 SPI 总线。SPI 可用来连接各种外设--显示器、网络控制器(以太网、CAN 总线)、UART 等。这些设备最好由内核设备驱动程序提供支持,但 spidev API 允许使用多种语言编写用户空间驱动程序。
SPI硬件
树莓派Zero、1、2 和 3 有三个 SPI 控制器:
SPI0有两个硬件芯片选择,可在所有树莓派的插头上使用;还有一个仅在计算模块上使用的备用映射。SPI1有三个硬件芯片选择,适用于除原始树莓派1A和B之外的所有树莓派型号。SPI2也有三个硬件芯片选择,但只适用于CM1、3 和 3+。
在树莓派4、400 和CM4上,有四条额外的 SPI 总线: SPI3 至 SPI6,每条总线有 2 个硬件芯片选择。这些额外的 SPI 总线可通过某些 GPIO 引脚上的备用功能分配使用。有关详细信息,请参阅 BCM2711 Arm 外围设备数据表。
BCM2835 Arm 外围设备数据表第 10 章介绍了主控制器。第 2.3 章介绍了辅助控制器。
引脚/GPIO映射
SPI0
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 19 | GPIO10 | SPI0_MOSI |
| MISO | 21 | GPIO09 | SPI0_MISO |
| SCLK | 23 | GPIO11 | SPI0_SCLK |
| CE0 | 24 | GPIO08 | SPI0_CE0_N |
| CE1 | 26 | GPIO07 | SPI0_CE1_N |
SPI0备用映射(仅限CM,CM4 除外)
| SPI功能 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|
| MOSI | GPIO38 | SPI0_MOSI |
| MISO | GPIO37 | SPI0_MISO |
| SCLK | GPIO39 | SPI0_SCLK |
| CE0 | GPIO36 | SPI0_CE0_N |
| CE1 | GPIO35 | SPI0_CE1_N |
SPI1
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 38 | GPIO20 | SPI1_MOSI |
| MISO | 35 | GPIO19 | SPI1_MISO |
| SCLK | 40 | GPIO21 | SPI1_SCLK |
| CE0 | 12 | GPIO18 | SPI1_CE0_N |
| CE1 | 11 | GPIO17 | SPI1_CE1_N |
| CE2 | 36 | GPIO16 | SPI1_CE2_N |
SPI2(仅限CM,CM4 除外)
| SPI功能 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|
| MOSI | GPIO41 | SPI2_MOSI |
| MISO | GPIO40 | SPI2_MISO |
| SCLK | GPIO42 | SPI2_SCLK |
| CE0 | GPIO43 | SPI2_CE0_N |
| CE1 | GPIO44 | SPI2_CE1_N |
| CE2 | GPIO45 | SPI2_CE2_N |
SPI3(仅限BCM2711)
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 03 | GPIO02 | SPI3_MOSI |
| MISO | 28 | GPIO01 | SPI3_MISO |
| SCLK | 05 | GPIO03 | SPI3_SCLK |
| CE0 | 27 | GPIO00 | SPI3_CE0_N |
| CE1 | 18 | GPIO24 | SPI3_CE1_N |
SPI4(仅限BCM2711)
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 31 | GPIO06 | SPI4_MOSI |
| MISO | 39 | GPIO05 | SPI4_MISO |
| SCLK | 26 | GPIO07 | SPI4_SCLK |
| CE0 | 07 | GPIO04 | SPI4_CE0_N |
| CE1 | 22 | GPIO25 | SPI4_CE1_N |
SPI5(仅限BCM2711)
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 08 | GPIO14 | SPI5_MOSI |
| MISO | 33 | GPIO13 | SPI5_MISO |
| SCLK | 10 | GPIO15 | SPI5_SCLK |
| CE0 | 32 | GPIO12 | SPI5_CE0_N |
| CE1 | 37 | GPIO26 | SPI5_CE1_N |
SPI6(仅限BCM2711)
| SPI功能 | 插头引脚 | Broadcom 引脚名称 | Broadcom 引脚功能 |
|---|---|---|---|
| MOSI | 38 | GPIO20 | SPI6_MOSI |
| MISO | 35 | GPIO19 | SPI6_MISO |
| SCLK | 40 | GPIO21 | SPI6_SCLK |
| CE0 | 12 | GPIO18 | SPI6_CE0_N |
| CE1 | 13 | GPIO27 | SPI6_CE1_N |
主模式
信号名称缩写
SCLK :: 串行时钟
CE : 芯片使能(通常称为芯片选择)
MOSI : 主出从从输入
MISO : 主入从出
MOMI : 主出主输入
标准模式
在标准 SPI 模式下,外设执行标准的三线串行协议(SCLK、MOSI 和 MISO)。
双向模式
在双向 SPI 模式中,执行的是相同的 SPI 标准,但数据只用一根线(MOMI),而不是标准模式中的两根线(MISO 和 MOSI)。在该模式下,MOSI 引脚用作 MOMI 引脚。
LoSSI 模式(低速串行接口)
LoSSI 标准允许向外围设备(LCD)发出命令,并与外围设备之间传输数据。LoSSI 命令和参数的长度为 8 位,但有一个额外位用于指示字节是命令还是参数/数据。如果是数据,则将该额外位设置为高电平,如果是命令,则将其设置为低电平。由此产生的 9 位值被序列化到输出端。LoSSI 通常与 MIPI DBI C 型兼容 LCD 控制器一起使用。
某些命令会触发 SPI 控制器的自动读取,因此该模式不能用作多用途 9 位 SPI。
传输模式
- 轮询
- 中断
- DMA
速度
CLK 寄存器的 CDIV(时钟分频��器)字段设置 SPI 时钟速度:
SCLK : 核心时钟/CDIV
如果 CDIV 设置为 0,则除数为 65536。除数必须是 2 的倍数,奇数向下舍入。请注意,由于模拟电气问题(上升时间、驱动强度等),并非所有可能的时钟速率都可用。
更多信息,请参阅 Linux 驱动程序部分。
芯片选择
在 DMA 模式下工作时,与 CS 线路自动断言和取消断言有关的设置和保持时间如下:
- CS 线将在传输的第一个字节的 msb 之前至少 3 个核心时钟周期被置信。
- CS 线路在最后一个时钟脉冲的后沿之后的 1 个核心时钟周期内将被取消断言。
SPI软件
Linux驱动程序
默认的 Linux 驱动程序是 spi-bcm2835。
SPI0 默认禁用。要启用它,请使用 raspi-config,或确保 /boot/firmware/config.txt 中的 dtparam=spi=on 一行未被注释。默认情况下,它使用 2 条芯片选择线,但可以使用 dtoverlay=spi0-1cs 将其减少到 1 条。dtoverlay=spi0-2cs 也存在,在不带任何参数的情况下,它等同于 dtparam=spi=on。
要启用 SPI1,可以使用 1、2 或 3 条芯片选择线。在 /boot/firmware/config.txt 中添加相应行:
#1 chip select
dtoverlay=spi1-1cs
#2 chip select
dtoverlay=spi1-2cs
#3 chip select
dtoverlay=spi1-3cs
SPI2、SPI3、SPI4、SPI5 和 SPI6 也有类似的叠加。
由于某些限制,驱动程序不使用硬件芯片选择线,而是使用任意数量的 GPIO 作为软件/GPIO 芯片选择。这意味着你可以自由选择任何空闲的 GPIO 作为 CS 线路,所有这些 SPI 重叠都包含该控制--详情请参见 /boot/firmware/overlays/README,或运行(例如)dtoverlay -h spi0-2cs(dtoverlay -a | grep spi 可能有助于列出所有这些线路)。
速度
驱动程序支持内核时钟整除的所有速度�,但如上所述,由于 GPIO 和所连接设备的限制,并非所有这些速度都支持数据传输。根据经验,任何超过 50MHz 的速度都不可能工作,但具体情况可能会有所不同。
支持的模式位
SPI_CPOL : 时钟极性
SPI_CPHA : 时钟相位
SPI_CS_HIGH : 片选高电平有效
SPI_NO_CS : 每总线 1 个设备,无片选
SPI_3WIRE : 双向模式,数据输入和输出引脚共享
spi-bcm2835 内核模块支持双向或 3线 模式。请注意,在这种模式下,spi_transfer 结构的 tx 或 rx 字段必须是空指针,因为只能进行半双工通信。否则,传输将失败。spidev_test.c 源代码没有正确考虑这一点,因此在三线模式下根本无法工作。
每个字支持的位数
- 8 - 正常
- 9 - 支持 LoSSI 模式。
传输模式
所有 SPI 总线都支持中断模式。SPI0 和 SPI3-6 还支持 DMA 传输。
SPI驱动程序延迟
本主题讨论延迟问题。
spidev
spidev 为单个 SPI CS 线路提供了一个基于 ioctl 的用户空间接口。设备树(Device Tree)用于指示 CS 线路是由内核驱动模块驱动,还是由 spidev 代表用户管理;两者不可能同时进行。请注意,树莓派自己的内核对使用设备树来启用 spidev 比较宽松--上游内核会对此类使用发出警告,最终可能会完全禁止使用。
C语言使用spidev
Linux 文档中有一个环回测试程序,可以作为一个起点。请参阅 "故障排除" 部分。
Python使用spidev
有几个 Python 库可以访问 spidev,包括 spidev (pip install spidev - 参见 https://pypi.org/project/spidev/) 和 SPI-Py (https://github.com/lthiery/SPI-Py)。
shell(如 bash)中使用spidev
以下命令将写入二进制 1、2 和 3:
echo -ne "\x01\x02\x03" > /dev/spidev0.0
其他SPI库
还有其他用户空间库通过直接操作硬件来提供 SPI 控制:不推荐使用这种方法。
故障排除
环回测��试
可用于测试 SPI 发送和接收。在 MOSI 和 MISO 之间接一根线。它不测试 CE0 和 CE1。
wget https://raw.githubusercontent.com/raspberrypi/linux/rpi-6.1.y/tools/spi/spidev_test.c
gcc -o spidev_test spidev_test.c
./spidev_test -D /dev/spidev0.0
spi mode: 0
bits per word: 8
max speed: 500000 Hz (500 KHz)
FF FF FF FF FF FF
40 00 00 00 00 95
FF FF FF FF FF FF
FF FF FF FF FF FF
FF FF FF FF FF FF
DE AD BE EF BA AD
F0 0D
以上部分内容抄自 elinux SPI 页面,该页面也借鉴了此处内容。两者均采用 CC-SA 许可。
通用串行总线(USB)
一般来说,Linux 支持的所有设备都可以与树莓派一起使用,但树莓派4之前的型号会受到一些限制。
最大功率输出
与所有电脑一样,树莓派上的 USB 端口提供的电力是有限的。USB 设备的问题通常是由电源问题引起的。要排除电源不足的原因,请使用供电集线器将 USB 设备连接到树莓派。
| 型号 | USB端口最大功率输出 |
|---|---|
| 树莓派Zero,1 | 每端口 500mA 1 |
| 树莓派 2、3、4 | 所有端口总计 1200mA |
| 树莓派5 | 如果使用 3A 电源,则为 600mA;如果使用 5A 电源,则为 1600mA |
1对于原始树莓派1 Model B,每个端口的电流限制为 100mA。
树莓派5
树莓派5需要能够在 +5V 电压下提供 3A 电流(15W)的优质 USB-C 电源才能启动。不过,使用这样的电源会限制外设的电流消耗。如果您使用的电源无法在首次启动时以 +5V 电压提供 5A 电流,则操作系统会警告您外围设备的电流将限制在 600mA。
对于希望驱动大功率外设(如硬盘和固态硬盘),同时为峰值工作负载保留余量的用户,应使用能够在 +5V 电压下提供 5A 电流(25W)的支持 USB-PD 的电源。如果树莓派5固件检测到这样的电源,就会将外围设备的 USB 电流限制提高到 1.6A,为下游 USB 设备提供 5W 的额外电源,并提供 5W 的额外板载电源预算。
电源预算由 USB 端口和风扇接头共享。
树莓派4
树莓派4包含两个 USB 3.0 端口和两个 USB 2.0 端口,它们与 VL805 USB 控制器相连。所有四个端口上的 USB 2.0 线路都连接到 VL805 中的一个 USB 2.0 集线器:这就将 USB 1.1 和 USB 2.0 设备的总可用带宽限制在单个 USB 2.0 端口的带宽范围内。
在树莓派4上,以前型号使用的 USB 控制器位于 USB Type C 端口上,默认情况下被禁用。
树莓派Zero、1、2和3
树莓派1B+、树莓派2和树莓派3板包含四个 USB 2.0 端口。树莓派Zero板包含一个微型 USB On-The-Go 端口。
树莓派4之前型号的 USB 控制器对某些设备只有基本的支持,因此软件处理开销较大。它还只支持一个根 USB 端口:来自连接设备的所有流量都通过这条单一总线传输,其最高运行速度为 480Mbps。
USB 2.0 规范定义了三种设备速度--低速、全速和高速。大多数鼠标和键盘为低速,大多数 USB 音效设备为全速,大多数视频设备(网络摄像头或视频采集)为高速。
一般来说,将多个高速 USB 设备连接到树莓派不会有任何问题。
与低速和全速设备通话时产生的软件开销意味着同时激活低速和全速设备的数量有限制。少量此类设备连接到 树莓派不会造成任何问题。
已知的USB问题
与USB3.0集线器的互操作性
在使用全速或低速设备(包括大多数鼠标和键盘)时,USB 3.0 集线器存在一个问题。大多数 USB 3.0 集线器硬件中的一个错误意味着��树莓派4之前的型号无法与连接到 USB 3.0 集线器的全速或低速设备对话。
通过 USB 3.0 集线器连接 USB 2.0 高速设备(包括 USB 2.0 集线器)时可正常运行。
避免将低速或全速设备连接到 USB 3.0 集线器。作为一种变通方法,将 USB 2.0 集线器插入 USB 3.0 集线器的下游端口并连接低速设备,或在树莓派和 USB 3.0 集线器之间使用 USB 2.0 集线器,然后将低速设备插入 USB 2.0 集线器。
USB1.1网络摄像头
老式网络摄像头可能是全速设备。由于这些设备会传输大量数据并产生额外的软件开销,因此无法保证可靠运行。作为一种变通方法,可尝试使用较低分辨率的摄像头。
深奥的USB声卡
昂贵的发烧级声卡通常使用大量 USB 带宽:96kHz/192kHz DAC 无法保证可靠运行。作为一种变通方法,强制输出流为 CD 质量(44.1kHz/48kHz 16 位)可将流带宽降至可靠水平。
单TT USB集线器
USB 2.0 和 3.0 集线器有一种与连接到其下游端口的全速或低速设备对话的机制,称为事务转换器 (TT)。该设备可缓冲来自主机的高速请求,并以全速或低速将其传输到下游设备。USB 规范允许两种集线器配置: 单 TT(所有端口一个 TT��)和多 TT(每个端口一个 TT)。由于硬件限制,如果在单 TT 集线器上插入过多的全速或低速设备,设备可能会表现不可靠。建议使用多 TT 集线器连接多个全速和低速设备。作为一种变通方法,将全速和低速设备分散到树莓派自身的 USB 端口和单 TT 集线器之间。
树莓派修订码
每个不同的树莓派型号修订版都有一个独特的修订码。你可以通过运行以下命令查找树莓派的修订码
cat /proc/cpuinfo
最后三行显示硬件类型、修订代码和树莓派的唯一序列号。例如
Hardware : BCM2835
Revision : a02082
Serial : 00000000765fc593
所有树莓派计算机都会报告 BCM2835,即使是使用 BCM2836、BCM2837、BCM2711 和 BCM2712 处理器的计算机也不例外。您不应使用此字符串来检测处理器。请使用以下信息或 cat /sys/firmware/devicetree/base/model 解码修订码。根据您运行的内核版本不同,cpuinfo 输出中可能包含"Model"行,也可能不包含"Hardware"行。
旧格式修订码
第一批树莓派型号有从 0002 到 0015 的十六进制修订代码:
| 代码 | 型号 | 修订 | 内存 | 制造商 |
|---|---|---|---|---|
| 0002 | B | 1.0 | 256MB | Egoman |
| 0003 | B | 1.0 | 256MB | Egoman |
| 0004 | B | 2.0 | 256MB | Sony UK |
| 0005 | B | 2.0 | 256MB | Qisda |
| 0006 | B | 2.0 | 256MB | Egoman |
| 0007 | A | 2.0 | 256MB | Egoman |
| 0008 | A | 2.0 | 256MB | Sony UK |
| 0009 | A | 2.0 | 256MB | Qisda |
| 000d | B | 2.0 | 512MB | Egoman |
| 000e | B | 2.0 | 512MB | Sony UK |
| 000f | B | 2.0 | 512MB | Egoman |
| 0010 | B+ | 1.2 | 512MB | Sony UK |
| 0011 | CM1 | 1.0 | 512MB | Sony UK |
| 0012 | A+ | 1.1 | 256MB | Sony UK |
| 0013 | B+ | 1.2 | 512MB | Embest |
| 0014 | CM1 | 1.0 | 512MB | Embest |
| 0015 | A+ | 1.1 | 256MB/512MB | Embest |
新格式修订代码
随着树莓派2的推出,引入了新格式修订代码。十六进制代码的每一位都代表了有关修订版的信息,而不是按顺序排列:
NOQuuuWuFMMMCCCCPPPPTTTTTTTTTRRRR
| 区域 | 含义 | 选项 |
|---|---|---|
| N(位 31) | 过电压 | 0:允许过电压 |
| 1:不允许过电压 | ||
| O(位 30) | OTP 编程1 | 0:允许 OTP 编程 |
| 1: 不允许 OTP 编程 | ||
| Q(位 29) | OTP 读取1 | 0:允许 OTP 读取 |
| 1:禁止 OTP 读取 | ||
| uuu(位 26-28) | 未使用 | 未使用 |
| W(位 25) | 保修位2 | 0:保修完好 |
| 1:超频导致保修失效 | ||
| u(位 24) | 未使用 | 未使用 |
| F(位 23) | 新标志 | 1:新式修订 |
| 0:旧式修订 | ||
| MMM(位 20-22) | 内存大小 | 0: 256MB |
| 1: 512MB | ||
| 2: 1GB | ||
| 3: 2GB | ||
| 4: 4GB | ||
| 5: 8GB | ||
| 6: 16GB | ||
| 7: 其它^other | ||
| CCCC(位 16-19) | 制造商 | 0: Sony UK |
| 1: Egoman | ||
| 2: Embest | ||
| 3: Sony Japan | ||
| 4: Embest | ||
| 5: Stadium | ||
| PPPP(位 12-15) | 处理器 | 0: BCM2835 |
| 1: BCM2836 | ||
| 2: BCM2837 | ||
| 3: BCM2711 | ||
| 4: BCM2712 | ||
| TTTTTTTT (位 4-11) | 类型 | 0x00: A |
| 0x01: B | ||
| 0x02: A+ | ||
| 0x03: B+ | ||
| 0x04: 2B | ||
| 0x05: Alpha(早期原型) | ||
| 0x06: CM1 | ||
| 0x08: 3B | ||
| 0x09: Zero | ||
| 0x0a: CM3 | ||
| 0x0c: Zero W | ||
| 0x0d: 3B+ | ||
| 0x0e: 3A+ | ||
| 0x0f: 仅供内部使用 | ||
| 0x10: CM3+ | ||
| 0x11: 4B | ||
| 0x12: Zero 2 W | ||
| 0x13: 400 | ||
| 0x14: CM4 | ||
| 0x15: CM4S | ||
| 0x16: 仅供内部使用 | ||
| 0x17: 5 | ||
| 0x18: CM5 | ||
| 0x19: 500/500+ | ||
| 0x1a: CM5 Lite | ||
| 0x1b: CM0 | ||
| RRRR (位 0-3) | 修订 | 0、1、2 等 |
使用中的新式修订编码
此列表并非详尽无遗--可能还有一些代码未在此表中列出。有关使用修订代码识别电路板的最佳实践,请参阅下一节。
| 代码 | 型号 | 修订版 | RAM | 制造商 |
|---|---|---|---|---|
| 900021 | A+ | 1.1 | 512MB | Sony UK |
| 900032 | B+ | 1.2 | 512MB | Sony UK |
| a01040 | 2B | 1.0 | 1GB | Sony UK |
| a01041 | 2B | 1.1 | 1GB | Sony UK |
| a21041 | 2B | 1.1 | 1GB | Embest |
| a02042 | 2B (with BCM2837) | 1.2 | 1GB | Sony UK |
| a22042 | 2B (with BCM2837) | 1.2 | 1GB | Embest |
| 900061 | CM1 | 1.1 | 512MB | Sony UK |
| a02082 | 3B | 1.2 | 1GB | Sony UK |
| a22082 | 3B | 1.2 | 1GB | Embest |
| a32082 | 3B | 1.2 | 1GB | Sony Japan |
| a52082 | 3B | 1.2 | 1GB | Stadium |
| a22083 | 3B | 1.3 | 1GB | Embest |
| 900092 | Zero | 1.2 | 512MB | Sony UK |
| 920092 | Zero | 1.2 | 512MB | Embest |
| 900093 | Zero | 1.3 | 512MB | Sony UK |
| 920093 | Zero | 1.3 | 512MB | Embest |
| a020a0 | CM3 | 1.0 | 1GB | Sony UK |
| a220a0 | CM3 | 1.0 | 1GB | Embest |
| 9000c1 | Zero W | 1.1 | 512MB | Sony UK |
| a020d3 | 3B+ | 1.3 | 1GB | Sony UK |
| a020d4 | 3B+ | 1.4 | 1GB | Sony UK |
| 9020e0 | 3A+ | 1.0 | 512MB | Sony UK |
| 9020e1 | 3A+ | 1.1 | 512MB | Sony UK |
| a02100 | CM3+ | 1.0 | 1GB | Sony UK |
| a03111 | 4B | 1.1 | 1GB | Sony UK |
| b03111 | 4B | 1.1 | 2GB | Sony UK |
| c03111 | 4B | 1.1 | 4GB | Sony UK |
| b03112 | 4B | 1.2 | 2GB | Sony UK |
| c03112 | 4B | 1.2 | 4GB | Sony UK |
| b03114 | 4B | 1.4 | 2GB | Sony UK |
| c03114 | 4B | 1.4 | 4GB | Sony UK |
| d03114 | 4B | 1.4 | 8GB | Sony UK |
| b03115 | 4B | 1.5 | 2GB | Sony UK |
| c03115 | 4B | 1.5 | 4GB | Sony UK |
| d03115 | 4B | 1.5 | 8GB | Sony UK |
| 902120 | Zero 2 W | 1.0 | 512MB | Sony UK |
| c03130 | 400 | 1.0 | 4GB | Sony UK |
| a03140 | CM4 | 1.0 | 1GB | Sony UK |
| b03140 | CM4 | 1.0 | 2GB | Sony UK |
| c03140 | CM4 | 1.0 | 4GB | Sony UK |
| d03140 | CM4 | 1.0 | 8GB | Sony UK |
| b04170 | 5 | 1.0 | 2GB | Sony UK |
| c04170 | 5 | 1.0 | 4GB | Sony UK |
| d04170 | 5 | 1.0 | 8GB | Sony UK |
| a04171 | 5 | 1.0 | 1GB | Sony UK |
| b04171 | 5 | 1.1 | 2GB | Sony UK |
| c04171 | 5 | 1.1 | 4GB | Sony UK |
| d04171 | 5 | 1.1 | 8GB | Sony UK |
| e04171 | 5 | 1.1 | 16GB | Sony UK |
| b04180 | CM5 | 1.0 | 2GB | Sony UK |
| c04180 | CM5 | 1.0 | 4GB | Sony UK |
| d04180 | CM5 | 1.0 | 8GB | Sony UK |
| e04180 | CM5 | 1.0 | 16GB | Sony UK |
| d04190 | 500 | 1.0 | 8GB | Sony UK |
| e04190 | 500+ | 1.0 | 16GB | Sony UK |
| b041a0 | CM5 Lite | 1.0 | 2GB | Sony UK |
| c041a0 | CM5 Lite | 1.0 | 4GB | Sony UK |
| d041a0 | CM5 Lite | 1.0 | 8GB | Sony UK |
| e041a0 | CM5 Lite | 1.0 | 16GB | Sony UK |
使用修订码识别电路板
通过命令行,我们可以使用以下命令获取电路板的修订码:
$cat /proc/cpuinfo | grep Revision
Revision:c03111
在上面的例子中,十六进制版本号为 c03111。将其转换为二进制,得到 0 0 0 000 0 0 1 100 0000 0011 00010001 0001。根据上表,我们插入了空格来表示修订码各部分之间的边界。
从最低位开始,最下面的四位(0-3)是电路板的版本号,所以这块电路板的版本号是 1。接下来的八位(4-11)是电路板类型,这里是二进制 00010001,十六进制 11,所以这是树莓派4B。使用相同的过程,我们可以确定处理器是 BCM2711,电路板由英国索尼公司制造,内存为 4GB。
在程序中获取修订码
显然,编程语言种类繁多,我们不可能给出所有语言的示例,但这里有两个 C 语言和 Python 语言的快速示例。这两个示例都使用系统调用来运行 bash 命令,获取 cpuinfo 并将结果导入 awk 以恢复所需的修订码。然后,它们使用比特运算从代码中提取出新、型号和内存字段。
#include <stdio.h>
#include <stdlib.h>
int main( int argc, char *argv[] )
{
FILE *fp;
char revcode[32];
fp = popen("cat /proc/cpuinfo | awk '/Revision/ {print $3}'", "r");
if (fp == NULL)
exit(1);
fgets(revcode, sizeof(revcode), fp);
pclose(fp);
int code = strtol(revcode, NULL, 16);
int new = (code >> 23) & 0x1;
int model = (code >> 4) & 0xff;
int mem = (code >> 20) & 0x7;
if (new && model == 0x11 && mem >= 3) // Note, 3 in the mem field is 2GB
printf("We are a 4B with at least 2GB of RAM!\n" );
return 0;
}
Python 中也是一样:
import subprocess
cmd = "cat /proc/cpuinfo | awk '/Revision/ {print $3}'"
revcode = subprocess.check_output(cmd, shell=True)
code = int(revcode, 16)
new = (code >> 23) & 0x1
model = (code >> 4) & 0xff
mem = (code >> 20) & 0x7
if new and model == 0x11 and mem >= 3 : # Note, 3 in the mem field is 2GB
print("We are a 4B with at least 2GB RAM!")
使用修订代码的最佳实践
为避��免在创建新电路板版本时出现问题,请勿使用版本代码(如 c03111)。
简单的实施方法是使用支持的修订代码列表,将检测到的代码与列表进行比较,以确定设备是否受支持。
当出现新的电路板修订版或生产地点发生变化时,这种方法就会失效:每种情况都会产生一个新的修订代码,而该代码不在支持的修订代码列表中。这将导致同一电路板类型的新版本被拒绝,尽管它们总是向后兼容的。每次出现新的修订代码时,都必须发布包含新修订代码的新支持修订代码列表--这是一项沉重的支持负担。
请使用以下方法之一:
- 根据电路板类型字段(3A、4B 等)进行筛选,该字段可显示型号,但不显示修订版。
- 根据内存容量字段进行筛选,因为内存与板卡的计算能力大致对应。
例如,您可以将支持范围限制在具有 2GB 或更大内存的 Raspberry Pi 4B 型号上。 上一节中的示例就采用了这种推荐方法。
在检查其他字段之前,请务必检查第 23 位 新 标志,以确保修订代码是��新版本。
跨发行版检查 Raspberry Pi 型号和 CPU
不同的 Linux 发行版对 /proc/cpuinfo的支持和格式设置各不相同。要在任何 Linux 发行版(包括 Raspberry Pi OS)上检查 Raspberry Pi 设备的型号或 CPU,请检查设备树:
cat /proc/device-tree/compatible | tr '\0' '\n'
raspberrypi,5-model-b
brcm,bcm2712
这将输出两个空分隔字符串值,每个值包含一个以逗号分隔的品牌和型号。例如,Raspberry Pi 5 会输出上面的电路板和 CPU 字符串。它们对应于以下值:
raspberrypi(电路板型号)5-model-b(电路板型号)brcm(CPU 型号)bcm2712(CPU 型号)
Raspberry Pi 型号的设备树值如下:
| 设备名 | 制造商 | 型号 | CPU 制造商 | CPU |
|---|---|---|---|---|
| Raspberry Pi 500 / 500+ | raspberrypi | 500 | brcm | bcm2712 |
| Raspberry Pi CM5 | raspberrypi | 5-compute-module | brcm | bcm2712 |
| Raspberry Pi 5 | raspberrypi | 5-model-b | brcm | bcm2712 |
| Raspberry Pi 400 | raspberrypi | 400 | brcm | bcm2711 |
| Raspberry Pi Compute Module 4S | raspberrypi | 4s-compute-module | brcm | bcm2711 |
| Raspberry Pi Compute Module 4 | raspberrypi | 4-compute-module | brcm | bcm2711 |
| Raspberry Pi 4 Model B | raspberrypi | 4-model-b | brcm | bcm2711 |
| Raspberry Pi Zero 2 W | raspberrypi | model-zero-2-w | brcm | bcm2837 |
| Raspberry Pi Compute Module 3+ | raspberrypi | 3-plus-compute-module | brcm | bcm2837 |
| Raspberry Pi Compute Module 3 | raspberrypi | 3-compute-module | brcm | bcm2837 |
| Raspberry Pi 3 Model A+ | raspberrypi | 3-model-a-plus | brcm | bcm2837 |
| Raspberry Pi 3 Model B+ | raspberrypi | 3-model-b-plus | brcm | bcm2837 |
| Raspberry Pi 3 Model B | raspberrypi | 3-model-b | brcm | bcm2837 |
| Raspberry Pi 2 Model B Rev 1.2 | raspberrypi | 2-model-b-rev2 | brcm | bcm2837 |
| Raspberry Pi 2 Model B | raspberrypi | 2-model-b | brcm | bcm2836 |
| Raspberry Pi Zero W | raspberrypi | model-zero-w | brcm | bcm2835 |
| Raspberry Pi Zero | raspberrypi | model-zero | brcm | bcm2835 |
| Raspberry Pi Compute Module 1 | raspberrypi | compute-module | brcm | bcm2835 |
| Raspberry Pi Model A+ | raspberrypi | model-a-plus | brcm | bcm2835 |
| Raspberry Pi Model B+ | raspberrypi | model-b-plus | brcm | bcm2835 |
| Raspberry Pi Model B Rev 2 | raspberrypi | model-b-rev2 | brcm | bcm2835 |
| Raspberry Pi Model A | raspberrypi | model-a | brcm | bcm2835 |
| Raspberry Pi Model B | raspberrypi | model-b | brcm | bcm2835 |
中文翻译版以英文版相同知识授权方式共享:CC-BY-SA 4.0。交流 Q群:498908352